
- O que é um Servo?como é que Controlo um Servo?como posso controlar um Servo de um Arduino?como controlo Um Servo de um Pi Raspbery?como posso alimentar um Servo?como é que Envio um sinal a uma longa distância?como faço para rodar um Servo uma quantidade específica (90°, 180°, contínua, etc.)?como posso substituir um conjunto de servomotores?como é medida a velocidade do Servo?como é medido o binário Servo?
- A que se refere a” direção ” de um Servo?o que é uma linha Servo?,o que é um Servo?
Como É que Controlo um Servo?
Ao contrário dos motores de corrente contínua escovados, os servos não podem ser executados simplesmente aplicando uma tensão. Além de fornecer tensão de alimentação (no fio vermelho) para o motor para puxar, um sinal específico chamado de sinal PWM deve ser enviado no fio de sinal (geralmente amarelo ou branco). Este sinal pode vir de uma variedade de fontes, tais como controladores servo, receptores RC, ou Arduinos.
 Servos são controlados enviando-lhes um pulso de largura variável. O fio de controlo é usado para enviar este pulso., Os parâmetros para este pulso são que ele tem um pulso mínimo, um pulso máximo, e uma taxa de repetição. Dadas as restrições de rotação do servo, neutro é definido para ser a posição onde o servo tem exatamente a mesma quantidade de rotação potencial no Sentido DOS ponteiros do relógio como ele faz no sentido contrário dos ponteiros do relógio. É importante notar que diferentes servos terão diferentes restrições em sua rotação, mas todos eles têm uma posição neutra, e essa posição é sempre em torno de 1,5 milisegundos (ms).,
Servos são controlados enviando-lhes um pulso de largura variável. O fio de controlo é usado para enviar este pulso., Os parâmetros para este pulso são que ele tem um pulso mínimo, um pulso máximo, e uma taxa de repetição. Dadas as restrições de rotação do servo, neutro é definido para ser a posição onde o servo tem exatamente a mesma quantidade de rotação potencial no Sentido DOS ponteiros do relógio como ele faz no sentido contrário dos ponteiros do relógio. É importante notar que diferentes servos terão diferentes restrições em sua rotação, mas todos eles têm uma posição neutra, e essa posição é sempre em torno de 1,5 milisegundos (ms).,
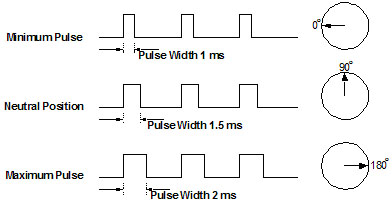
o ângulo é determinado pela duração de um impulso que é aplicado ao fio de controlo. Isto é chamado modulação de largura de pulso. O servo espera ver um pulso a cada 20 ms. o comprimento do pulso irá determinar a distância que o motor gira. Por exemplo, um impulso de 1,5 ms fará com que o motor vire para a posição de 90 graus (posição neutra).
Quando estes servos são ordenados a se mover, eles se moverão para a posição e manter essa posição., Se uma força externa empurra contra o servo enquanto o servo está mantendo uma posição, o servo resistirá a sair dessa posição. A quantidade máxima de força que o servo pode exercer é a classificação de torque do servo. Os Servos não manterão sua posição para sempre; o pulso de posição deve ser repetido para instruir o servo a permanecer em posição.
Quando um pulso é enviado para um servo que é inferior a 1,5 ms o servo gira para uma posição e mantém seu eixo de saída algum Número de graus anti-horário a partir do ponto neutro. Quando o pulso é maior que 1,5 ms o oposto ocorre., A largura mínima e a largura máxima do pulso que irá comandar o servo para virar para uma posição válida São funções de cada servo. Diferentes marcas, e até mesmo diferentes servos da mesma marca, terão diferentes máximos e mínimos. Geralmente o pulso mínimo será de cerca de 1 ms de largura e o pulso máximo será de 2 ms de largura.
Outro parâmetro que varia de servo para servo é a taxa de curva. Este é o tempo que leva do servo para mudar de uma posição para outra., O pior momento de viragem é quando o servo está a manter a rotação mínima e é ordenado que vá para a rotação máxima. Isso pode levar vários segundos em servidores de torque muito alto.
a finalidade desta informação é dar uma visão geral de como os servos operam e como se comunicar com eles. Embora tenhamos tomado medidas para garantir a qualidade da informação aqui, a ServoCity não faz nenhuma garantia sobre a informação apresentada. ServoCity não pode ser responsabilizado ou responsável por qualquer uso ou uso indevido das informações fornecidas., Se você tem dúvidas sobre esta informação, por favor, e-mail [email protected] como posso controlar um Servo de um Arduino?como posso controlar um Servo de um Raspberry Pi?
enquanto Raspberry Pis pode emitir um sinal PWM, eles muitas vezes são incapazes de manter um sinal limpo devido à falta de um temporizador dedicado. Se você está controlando servo de um Raspberry Pi recomendamos obter um servo chapéu para o seu raspberry pi.como posso alimentar um Servo?,
a melhor maneira de alimentar um servo é com uma bateria com uma tensão dentro da Gama de tensão especificada na tabela servo pages specs. Certifique-se de usar uma bateria saudável que pode fornecer mais do que corrente suficiente. Uma vez que a corrente é puxada e não empurrada, ter mais corrente disponível do que é necessário não vai ferir o servo (é como ter mais gás do que você precisa para chegar em algum lugar em seu carro). A energia para o motor do servo é fornecida no fio vermelho., Pode ser útil cortar o fio vermelho (ou usar um X-Acto para puxar o conector da caixa) para que você possa fornecer energia separadamente do sinal. Isto permitir-lhe-ia ligar o seu receptor a uma bateria diferente do seu servo se precisassem de tensões diferentes. Ele também permitiria que você alimentasse o motor do seu servo diretamente de uma bateria, enquanto o sinal vem de um Arduino, uma vez que os pinos Arduino não conseguem lidar com o tipo de corrente que um servo precisa (eles geralmente saem no máximo em 40mA).como é que Envio um sinal a uma longa distância?,
por vezes, ao enviar um sinal a uma longa distância, o sinal pode degradar-se devido à queda de tensão e interferência eletromagnética (EMI). Um amplificador de sinal servo pode resolver estes problemas e facilitar a transmissão do sinal a uma grande distância do fio.
Como faço para rodar um Servo uma quantidade específica (90°, 180°, contínua, etc.)?
 When controlled with a radio control system, most hobby servos offer 90° (45° each direction) rotation right out of the box., Isto pode, por vezes, ser aumentado se o seu sistema de rádio oferece ajustes de ponto final ou o seu controlador servo tem um PIN de jumper de 180°. Se você estiver usando servidores digitais Hitec, você simplesmente quer comprar o programador portátil para aumentar a rotação. Se você tem um servo analógico Hitec ou Futaba que oferece apenas 90° de rotação, a quantidade de rotação pode às vezes ser aumentada para 180°, realizando uma modificação simples.Nota: você pode comprar servidores Hitec de nós que são pré-modificados em nossa própria instalação de fabricação nas páginas individuais do servidor Hitec., Esta modificação anula todas as garantias ServoCity e Hitec.como posso substituir um conjunto de servomotores?
When controlled with a radio control system, most hobby servos offer 90° (45° each direction) rotation right out of the box., Isto pode, por vezes, ser aumentado se o seu sistema de rádio oferece ajustes de ponto final ou o seu controlador servo tem um PIN de jumper de 180°. Se você estiver usando servidores digitais Hitec, você simplesmente quer comprar o programador portátil para aumentar a rotação. Se você tem um servo analógico Hitec ou Futaba que oferece apenas 90° de rotação, a quantidade de rotação pode às vezes ser aumentada para 180°, realizando uma modificação simples.Nota: você pode comprar servidores Hitec de nós que são pré-modificados em nossa própria instalação de fabricação nas páginas individuais do servidor Hitec., Esta modificação anula todas as garantias ServoCity e Hitec.como posso substituir um conjunto de servomotores?
como é medida a velocidade do Servo?
como é medido o binário Servo?
a que se refere a” direcção ” de um Servo?
todos os servos irão rodar no Sentido DOS ponteiros do relógio e no sentido anti-horário. A direção em que o servo gira tudo depende do sinal que o servo está recebendo. Nem todos os servos correspondem no que diz respeito à direcção da rotação para fora da caixa., Se ligar um servidor de Hitec ao seu receptor de controlo de rádio ou controlador de servo e disser ao servo para virar à direita (no Sentido DOS ponteiros do relógio), ele irá mover-se para a direita. Se você, em seguida, ligar um servo Futaba no mesmo receptor ou controlador servo e dizer-lhe para ir na mesma direção que o servo Hitec fez, ele vai mover a direção oposta (no sentido anti-horário). Esta é uma correção fácil com a maioria dos sistemas de controle de rádio, uma vez que eles têm uma função de inversão de servo no transmissor., Esta diferença entre fabricantes é a razão pela qual cada servo terá uma spec chamando a direção que o servo irá se mover com um sinal PWM crescente.
o que é uma linha Servo?
o eixo de saída dentado de um servo é geralmente referido como uma linha de servo. Para uma análise de todos os diferentes tipos de servo splines sobre os servos que vendemos, confira a entrada Servo Spline em nosso glossário.