
- Hva er en Servo?
- Hvordan kan jeg Kontrollere en Servo?
- Hvordan kan jeg Kontrollere en Servo fra en Arduino?
- Hvordan kan jeg Kontrollere en Servo fra en Raspbery Pi?
- Hvordan kan jeg drive en Servo?
- Hvordan kan jeg Sende et Signal Over en Lang Distanse?
- Hvordan Gjør jeg Roter en Servo et Bestemt Beløp (90°, 180°, Kontinuerlig, etc)?
- Hvordan kan jeg Erstatte en Servo Gear Sett?
- Hvordan er Servo Hastighet Målt?
- Hvordan er Servo Dreiemoment Målt?
- Hva er «Retning» for en Servo som Refererer til?
- Hva er en Servo Rille?,
Hva er en Servo?
Hvordan kan jeg Kontrollere en Servo?
i Motsetning til børstet DC-motorer, servoer kan ikke kjøres ved bare å bruke en spenning. I tillegg til å levere spenning (på den røde ledningen) for motor til å trekke fra en bestemt signal kalles en PWM-Signalet må være sendt på signal wire (vanligvis gul eller hvit). Dette signalet kan komme fra en rekke kilder, for eksempel servo-kontrollere, RC-mottakere, eller Arduinos.
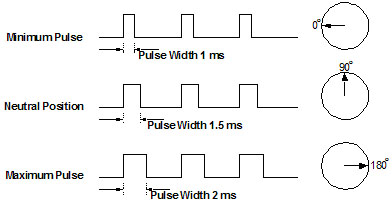
 Servoer er kontrollert ved å sende dem en puls av variabel bredde. Kontroll wire brukes til å sende denne pulsen., Parametrene for denne pulsen er at den har et minimum puls, en maksimal puls, og en repetisjon pris. Gitt rotasjon begrensninger av servo, nøytral er definert til å være den posisjon der servo har nøyaktig samme mengde potensielle rotasjon i klokkens retning som gjør den i mot urviseren. Det er viktig å merke seg at ulike servoer har ulike begrensninger på rotasjon, men de har alle en nøytral posisjon, og at stillingen er alltid rundt 1,5 millisekunder (ms).,
Servoer er kontrollert ved å sende dem en puls av variabel bredde. Kontroll wire brukes til å sende denne pulsen., Parametrene for denne pulsen er at den har et minimum puls, en maksimal puls, og en repetisjon pris. Gitt rotasjon begrensninger av servo, nøytral er definert til å være den posisjon der servo har nøyaktig samme mengde potensielle rotasjon i klokkens retning som gjør den i mot urviseren. Det er viktig å merke seg at ulike servoer har ulike begrensninger på rotasjon, men de har alle en nøytral posisjon, og at stillingen er alltid rundt 1,5 millisekunder (ms).,

vinkelen er bestemt av varigheten av en puls som er brukt til kontroll wire. Dette kalles Pulse width Modulation. Servo forventer å se en puls hver 20 ms. Lengden på pulsen vil avgjøre hvor langt motoren slås. For eksempel, en 1,5 ms-puls vil gjøre motoren slå til 90 graders stilling (nøytral stilling).
Når disse servoer er befalt å flytte de vil flytte til den posisjon og holder den posisjonen., Hvis en ekstern kraft presser mot servo mens servo er å holde en posisjon, servo vil motstå fra å flytte ut av posisjon. Den maksimale mengden av kraft servo kan utøve den dreiemoment vurdering av servo. Servoer ikke vil holde sin posisjon for alltid skjønt; posisjon puls må gjentas for å instruere servo å holde seg i posisjon.
Når en puls som er sendt til en servo som er mindre enn 1,5 ms servo roterer til posisjon og holder sin utgående aksel noen antall grader mot klokka fra det nøytrale punktet. Når pulsen er større enn 1,5 ms det motsatte skjer., Den minimale bredden og den maksimale bredden av puls som vil kommandoen servo å slå til en gyldig posisjon er funksjoner av hver servo. Forskjellige merker, og med ulike servoer av samme merke, har ulike maksimum og minimum. Generelt minimums puls vil bli om lag 1 ms bredt og maksimal puls vil være 2 ms bredt.
en Annen parameter som varierer fra servo til servo er turn pris. Dette er tiden det tar fra servo til å endre seg fra en posisjon til en annen., I verste fall slå tid er når servo holder på minimum rotasjon, og det er befalt å gå til maksimalt rotasjon. Dette kan ta flere sekunder på svært høyt dreiemoment servoer.
formålet med denne informasjonen er å gi en oversikt over hvordan servoer fungere, og hvordan du skal kommunisere med dem. Selv om vi har tatt skritt for å sikre kvaliteten av informasjon her, ServoCity gir ingen garantier om den informasjonen som blir presentert. ServoCity kan ikke holdes ansvarlig eller ansvarlig for ethvert bruk eller misbruk av opplysningene som er gitt., Hvis du har spørsmål om denne informasjon, vennligst e-post [email protected].
Hvordan kan jeg Kontrollere en Servo fra en Arduino?
Hvordan kan jeg Kontrollere en Servo fra en Raspberry Pi?
Mens Raspberry Pis kan sende en PWM-signal, de er ofte ikke i stand til å opprettholde et rent signal på grunn av mangelen på en dedikert timer. Hvis du er kontrollerende servoer fra en Raspberry Pi vi sterkt anbefale å få en servo hatten for raspberry pi.
Hvordan kan jeg drive en Servo?,
Den beste måten å drive en servo er batteriet med et batteri med en spenning innenfor den spenning som er angitt på servo sider spesifikasjoner tabell. Sørg for å bruke en sunn batteri som kan levere mer enn nok strøm. Siden gjeldende er trukket og ikke presset, har mer energi tilgjengelig enn det som er nødvendig vil ikke skade servo (det er som å ha mer gass enn du trenger for å få et sted i bilen). Kraften for servo ‘ s motor følger med på den røde ledningen., Det kan være nyttig å klippe den røde ledningen (eller bruk en X-Acto å dra kontakten fra huset), slik at du kan levere strøm separat fra signalet. Dette vil tillate deg å slå på mottakeren på et annet batteri enn det servo hvis de trenger forskjellige spenninger. Det vil også tillate deg å slå din servo ‘ s motor direkte fra et batteri mens signalet kommer fra en Arduino siden Arduino pins ikke kan håndtere den type gjeldende en servo behov (de vanligvis maks ut på 40mA).
Hvordan kan jeg Sende et Signal Over en Lang Distanse?,
noen Ganger når du sender et signal over en lang avstand, kan signalet bli dårligere på grunn av spenningsfall og elektromagnetisk interferens (EMI). En servo signal booster kan løse disse problemene og gjøre det enkelt å overføre signalet over en stor avstand av wire.
Hvordan Gjør jeg Roter en Servo et Bestemt Beløp (90°, 180°, Kontinuerlig, etc)?
 Når den er kontrollert med en radio control system, de fleste hobby servoer tilbyr 90° (45° begge retninger) rotasjon rett ut av boksen., Dette kan noen ganger være økt hvis din radio system tilbyr end point justeringer eller din servo-kontrolleren har en 180° jumper-pin-koden. Hvis du bruker Hitec digital servoer, du bare ønsker å kjøpe håndholdt programmerer for å øke rotasjonen. Hvis du har en Hitec eller Futaba analoge servoer som bare tilbyr 90° rotasjon, mengden av rotasjon kan noen ganger være økt til 180° ved å utføre en enkel modifikasjon.
Når den er kontrollert med en radio control system, de fleste hobby servoer tilbyr 90° (45° begge retninger) rotasjon rett ut av boksen., Dette kan noen ganger være økt hvis din radio system tilbyr end point justeringer eller din servo-kontrolleren har en 180° jumper-pin-koden. Hvis du bruker Hitec digital servoer, du bare ønsker å kjøpe håndholdt programmerer for å øke rotasjonen. Hvis du har en Hitec eller Futaba analoge servoer som bare tilbyr 90° rotasjon, mengden av rotasjon kan noen ganger være økt til 180° ved å utføre en enkel modifikasjon.
Merk: Du kan kjøpe Hitec servoer fra oss som er pre-modifisert i vår egen fabrikk på den enkelte Hitec servo sider., Denne modifikasjon ugyldiggjør alle ServoCity og Hitec garantier.
Hvordan kan jeg Erstatte en Servo Gear Sett?
Hvordan er Servo Hastighet Målt?
Hvordan er Servo Dreiemoment Målt?
Hva er «Retning» for en Servo som Refererer til?
Alle servoer vil rotere med klokken og mot klokken. Retning servo roterer hele avhenger av signalet servo mottar. Ikke alle servoer match i forhold til retning av rotasjon rett ut av boksen., Hvis du kobler til en Hitec servo til dine radio-kontroll-mottaker eller servo-kontrolleren, og du fortelle servo å slå til høyre (med klokken), det vil flytte til høyre. Hvis du deretter kobler du en Futaba servo til samme mottaker eller servo-kontrolleren og fortelle det til å gå i samme retning som Hitec servo gjorde, det vil bevege seg i motsatt retning (mot klokken). Dette er lett å fikse med de fleste radio control systems, siden de har en servo reversering
funksjon på senderen., Denne forskjellen mellom produsenter er grunnen til hvert servo vil ha en spec ringe ut retningen som servo vil gå med et stadig økende PWM-signal.
Hva er en Servo Rille?
toothed output shaft av en servo er vanligvis referert til som en servo rille. For en oversikt over alle de forskjellige typer servo splines på servoer som vi selger, sjekk ut Servo Spline oppføring i vår ordliste.