Innholdsfortegnelse
Control System
Control systems spille en viktig rolle i vår dag-til-dag liv. Forestillingen om en automatisk kontroll systemet er enkelt og godt blandet i alle deler av livet vårt. Den automatiske kontroll-systemet spiller en viktig rolle i utvikling og forbedring av tekniske ferdigheter.,
et system er En kombinasjon av enheter og komponenter som er koblet sammen av noen form for regelmessig vekselsvirkningene til å handle sammen og utføre et bestemt mål. Systemet kan være fysiske, biologiske, økonomiske og lignende.
begrepet kontroll betyr å regulere, direkte eller kommando. Dermed, en kontroll system kan defineres som en kombinasjon av enheter og komponenter som er koblet til eller i slekt, slik som å kommando, direkte eller regulere seg selv eller et annet system.,
Kontroll-systemer brukes i mange programmer, for eksempel kontroll av temperatur, væske nivå, posisjon, hastighet, flow, trykk, akselerasjon, etc.
Funksjoner av en Kontroll-System
Den viktigste funksjonen av en kontroll systemet er at det bør være en klar matematisk sammenheng mellom input og output til systemet. Når forholdet mellom input og output til systemet kan være representert ved en lineær forholdsmessighet, systemet kalles en lineær kontroll system., Igjen når forholdet mellom input og output kan ikke være representert ved enkel lineær forholdsmessighet, heller inngang og utgang er i slekt med noen ikke-lineære forhold, systemet er referert til som en ikke-lineær kontroll system.
Kravene til en God Kontroll System
Nøyaktighet: Nøyaktighet er måling toleranse av apparatet og definerer grensene for de feil som er gjort når apparatet brukes i normale driftsforhold. Nøyaktigheten kan forbedres ved hjelp av tilbakemeldinger elementer., For å øke nøyaktigheten av enhver kontroll system feil detektor bør være til stede i kontrollsystemet.
Følsomhet: parametrene av et kontrollsystem er alltid i endring med endring i forholdene, interne forstyrrelser eller andre parametere. Denne endringen kan uttrykkes i form av sensitivitet. Noen styresystemet skal være ufølsom for slike parametre, men følsom for inngangssignaler bare.
Støy: En uønsket inngangssignalet er kjent som støy. En god kontroll systemet bør være i stand til å redusere støy effekt for bedre ytelse.,
Stabilitet: Det er en viktig egenskap av kontrollsystemet. For avgrenset inngangssignal, og produksjonen må være avgrenset og hvis input er null så produksjonen må være null, så kan en slik kontroll system sies å være et stabilt system.
Båndbredde: Et operativsystem frekvensområde bestemmer seg for båndbredde kontroll-system. Båndbredde bør være så store som mulig for frekvens respons av god kontroll system.
Speed: Det er den tiden det tar av kontroll-system for å oppnå stabil produksjon. En god kontroll system besitter høy hastighet., Forbigående periode for et slikt system er svært liten.
Svingning: Et lite antall av pendling eller konstant pendling til utgang har en tendens til å indikere at systemet skal være stabilt.
Grunnleggende Komponentene i en Kontroll-System
De grunnleggende komponentene i en kontroll av systemet kan bli representert ved:
- referanse input-elementet som forårsaker kommandoen signal;
- tilbakemelding element som gir tilbakemelding signal;
- feil detektor;
- kontroller;
- kontrollert system; og
- output signal, som er kontrollert utgang.,
Disse komponentene er vist i form av et system blokk-diagram som i figuren nedenfor, og er beskrevet som følger.
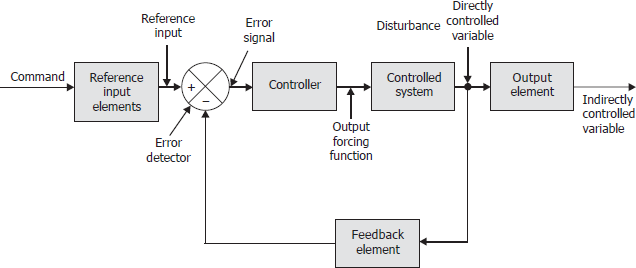
- Referanse Input Elementer: Disse utgjør posisjon tilbakemelding system som etablerer relasjonen mellom kommando og visse referanse inngang.,
- Kommando: Kommandoen er en bevisst introdusert signal etablert av noen, utenfor og uavhengig av tilbakemeldinger kontroll systemet er under vurdering.
- Referanse Innspill: Det er et signal som er etablert som en standard for sammenligning for en tilbakemelding systemet i kraft av sitt forhold til kommandoen.
- Feil Detektor: Det er et element som ett system variabel (feedback-signalet) er trukket fra en annen variabel (referanse-signalet) for å få den tredje variabel (feil signal). Det er også kalt en komparator.,
- Tilbakemelding Element: Feedback-signalet er en funksjon av kontrollert utgang som er sammenlignet med referanse signal for å få betjening signal.
- Feil Signal: Det er en algebraiske summen av referanse-inngang, og den primære tilbakemeldinger.
- Kontroller: kontrolleren er et element som er nødvendig for å generere de nødvendige kontroll-signal.
- Output Tvinge Funksjon: Det er tilstanden som er variert som en funksjon av betjening signal, slik som å endre verdien av kontrollert variabel.,
- Kontrollert System: Det er en kropp, prosess eller maskin som en bestemt betingelse er å bli kontrollert, for eksempel, et romskip, reaktor, kjele, CNC maskin, etc.
- Kontrollert Variabel: Det er en variabel som er direkte målt og kontrollert. Forstyrrelsen er inngang annet enn en kommando som har en tendens til å påvirke verdien av kontrollert variabel.
- Output Elementer: Dette er de elementene som forholdet mellom den direkte kontrollert variabel og indirekte kontrollert variabel.,
Klassifisering av Kontroll-System
Open-Loop Kontroll-System
Et kontrollsystem som ikke kan tilpasse seg endringene er kalt en » open-loop kontroll system. Generelt, manuell kontroll systemer er åpen-sløyfe-systemer. Blokkdiagram av open-loop kontroll system er vist i Figuren nedenfor.,

Her, r(t) er inngangssignalet u(t) er kontroll signal/betjening signal-og c(t) er utgangssignalet.
I dette systemet, produksjonen forblir uendret for konstant inngang. I tilfelle av uoverensstemmelse, innspill bør endres manuelt av en operatør., En åpen-sløyfe kontroll systemet er godt egnet når det er toleranse for svingninger i systemet og når systemet parameter variasjon kan håndteres uavhengig av miljøforholdene.
Fordeler med Open-loop System
- Disse systemene er enkel i konstruksjon og design.
- åpen-sløyfe-systemer er økonomisk.
- Disse systemene er lette fra vedlikehold synspunkt.
- Vanligvis, disse systemene er ikke mye plaget med problemer av stabilitet.
- Disse systemene er praktisk å bruke når produksjonen er vanskelig å måle.,
Ulemper
- Disse systemene er ikke nøyaktige og pålitelige fordi deres nøyaktighet er avhengig av nøyaktigheten av kalibreringen.
- I disse systemene, unøyaktige resultater er oppnådd med parameteren variasjoner, dvs., interne forstyrrelser.
- Rekalibrering av kontrolleren er nødvendig fra tid til annen for å opprettholde kvalitet og nøyaktighet.
Closed-Loop Kontroll-System
Noen system som kan reagere på endringer og gjøre korreksjoner ved i seg selv er kjent som en lukket-sløyfe kontroll system., Den eneste forskjellen mellom open-loop og lukket-sløyfe-systemer er tilbakemeldingen handling. Blokkdiagram for en lukket-sløyfe kontroll systemet er vist i Figuren nedenfor.
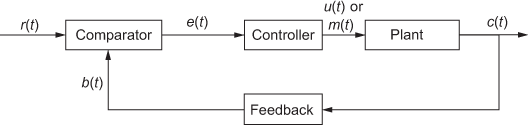
Her er resultatet av maskinen føres tilbake til en komparator (feil detektor). Utgangssignalet er sammenlignet med referanse inngang r(t) og feil signal e(t) er sendt til kontrolleren., Basert på feilen, kontrolleren justerer air conditioner innspill . Denne prosessen fortsetter inntil feilen blir utslettet. Både manuelle og maskinelle kontroller kan bli gjennomført i et lukket kretsløp. Den samlede gevinst av et system er redusert på grunn av tilstedeværelsen av tilbakemeldinger. For å kompensere for reduksjon av få, hvis en forsterker er innført for å øke forsterkningen av a-systemet, kan noen ganger bli ustabil.
Fordeler av nær-loop system
- I disse systemene, nøyaktighet er svært høy på grunn av korrigering av noen som oppstår feil.,
- Siden disse systemene følelse miljø endre så vel som interne forstyrrelser, feil-er endret.
- Det er en redusert effekt av ikke-linearitet i disse systemene.
- Disse systemene har høy båndbredde dvs., høye frekvensen sone.
- Det er fasiliteter av automatisering i disse systemene.
Ulemper
- systemene er komplisert i design.
- lukk-sløyfe-systemer er dyrere.
- Disse systemene kan være ustabil.,
Noen eksempler på open-loop og closed-loop kontroll-systemer er som følger:
- Trafikk-lys systemer varierer i drift. Noen systemer er lukket-sløyfe, og noen er open – loop. I åpne-løkke skriver, det er en timing mekanisme som er satt til å bytte lysene med jevne mellomrom, uavhengig av volumet av trafikk. I lukket-sløyfe-type, men mengden av trafikk som passerer gjennom veikryss er overvåket (elektronisk eller på annen måte), og varigheten av «rød» og «grønn» forholdene er justert for hver del av krysset tilsvarende.,
- Et eksempel på virkningen av en open-loop system er en bil-vask maskin der alle biler får den samme mengden vask uavhengig av hvor skitne de er. Her utgang er renhold av biler, noe som tilsvarer en gitt innstilling av maskinen (mengden av vann og vaske tid). Et menneske, men som vasker biler, automatisk sørger for at skitnere biler får mer oppmerksomhet enn andre. Bil vask av et ansvarlig menneske er derfor en lukket-sløyfe kontroll system. En vanlig vaskemaskin er et open-loop system.,
- Et kjøleskap er et lukket kretsløp. Temperaturen blir målt av en termostat som slår motoren PÅ når temperaturen stiger over ønsket verdi, og slår AV motoren når temperaturen igjen nådd ønsket verdi.
- belysning av et rom, et åpent kretsløp. Når lyset er slått på, vil det forbli på (til den er slått av ) uavhengig av om rommet er mørk eller lys.
Forskjeller mellom open-loop og lukket-sløyfe-systemer
| S.,Ingen. | Open-loop System | Closed-loop System |
| 1 | tilbakemeldinger elementet er fraværende. | tilbakemeldinger element som alltid er til stede. |
| 2 | En feil detektoren er ikke til stede. | En feil detektoren er alltid til stede. |
| 3 | En open-loop system er generelt stabile. | closed-loop system kan bli ustabil under visse betingelser. |
| 4 | De kan være påvirket av ikke-linearities i systemet. | De kan justere effekten av ikke-linearities til stede i systemet., |
| 5 | Det er lett å konstruere. | Det har komplisert konstruksjon. |
| 6 | Det er økonomisk. | Det er kostbart. |
| 7 | Den har en liten båndbredde. | Det har en stor båndbredde. |
| 8 | De er generelt unøyaktig. | De er nøyaktige. |
| 9 | Det har mindre vedlikehold. | Det har mer vedlikehold. |
| 10 | Det er upålitelige. | Den er pålitelig., |
| 11 | Examples: Washing machine, fixed time traffic control system, room heater, etc | Examples: Servomotor control, generator output voltage control system, refrigerator, biological system, etc. |
Other Types of Control Systems
Linear and Non-linear
A linear system is one that obeys the principle of superposition., Prinsippet om superposisjon sier at responsen produsert ved samtidig bruk av to forskjellige tvinge funksjoner er lik summen av individuelle svar.
Ikke-lineære systemer ikke er lydige mot prinsippet om superposisjon. Nesten alle praktiske systemer er ikke-lineær i noen grad. Ikke-linearities er innført på grunn av metning effekt av systemkomponenter, friksjons-styrker, spill mellom gear tog, mekaniske forbindelser, ikke-linearities av elektroniske komponenter som effektforsterkere, transistorer, etc., brukes., Kontroll av lineære systemer er lett i forhold til kontroll av ikke-lineære systemer.
Tid-invariant og tidsvarierende
Den tid-invariant control system er en hvis parametrene ikke varierer med tiden. Svaret på et slikt system er uavhengig av tiden på som input er brukt. For eksempel, motstand, induktans og kapasitans av et elektrisk nettverk er uavhengig av tid.
En tidsvarierende system er en der en eller flere parametre varierer med tiden. Svaret kommer an på tidspunkt der input er brukt., En plass kjøretøy kontroll system hvor masse avtar med tid, som drivstoff det bærer er konsumert i løpet av flyturen, er et eksempel på en tidsvarierende system.
Kontinuerlig Tid og Diskret
I løpende kontroll systemer, alle system parametere er en funksjon av kontinuerlig-tid t. En diskret-tid kontroll innebærer en eller flere variabler som er kjent bare på diskret instants tid.
En kontinuerlig-tid eller kontinuerlige data er en som signaler på ulike deler av systemet er kontinuerlige funksjoner av tiden. Disse signalene er kontinuerlig-tid-signaler., For eksempel, når vi ser hastighet kontroll av d.c. motoren, vet vi at output, det er, rotasjon i form av radianer per sekund er en funksjon av spenning og strøm er gitt som input til det på en kontinuerlig-tid-prinsippet. Et slikt system tar en kontinuerlig-tid input og gir en kontinuerlig-tid utgang.
Single Input Single Output (SISO) og Multi-Input–Flere-Output (MIMO)
Et system med én inngang og én utgang kalles en single input single output control system. Med andre ord, det er bare en kommando og en kontrollert utgang.,
Et system med flere innganger og flere utganger kalles en multi-input–multi-output control system. For eksempel, kjele tromme nivå kontroll, robot arm kontroll, etc. Robotarmen utfører flere funksjoner med flere innganger. Disse funksjonene kalles den grad av frihet.
Lumped Parameter og Distribuert Parameteren
Kontroll systemer som kan være beskrevet av ordinære differensialligninger lumped parameter kontroll-systemer mens fordelt parameter kontroll systemer er beskrevet av partielle differensialligninger., Parameterne for en lang overføring linje, det vil si motstand, induktans og kapasitans, er fordelt langs linjen, men de kan betraktes som samlet parametre på visse punkter.
Deterministiske og Stokastiske
En kontroll system er deterministisk hvis svaret er forutsigbar og repeterbare. Hvis ikke, kan det være at kontrollsystemet er en stokastisk kontroll system som innebærer tilfeldige variable parametre.,
Statiske og Dynamiske Systemer
Et system som kalles dynamisk eller tid-avhengig av om sin nåværende effekt avhenger av tidligere inngang, mens en statisk system er den som utgangsstrøm bare avhenger av den gjeldende inngangen.