
- Mikä on Servo?
- How Do I Control a Servo?
- miten Arduinon servoa ohjataan?
- How Do I Control a Servo from a Raspbery Pi?
- How Do I Power A Servo?
- Miten lähetän signaalin pitkän matkan aikana?
- miten kierrän servoa tietyn määrän (90°, 180°, jatkuva jne.)?
- Miten vaihdan Servo-vaihteiston?
- miten Servonopeutta mitataan?
- miten Servomomenttia mitataan?
- mihin Servon” suunta ” viittaa?
- mikä on Servo Spline?,
mikä on Servo?
Miten voin Hallita Servo?
toisin kuin harjatut tasavirtamoottorit, servoja ei voi ajaa pelkällä jännitteellä. Lisäksi toimittaa syöttöjännite (punainen lanka) moottori vetää, tietyn signaalin, jota kutsutaan PWM-Signaali on lähetetty signaali johto (yleensä keltainen tai valkoinen). Tämä signaali voi tulla useista lähteistä, kuten servo-ohjaimista, RC-vastaanottimista tai Arduinoista.
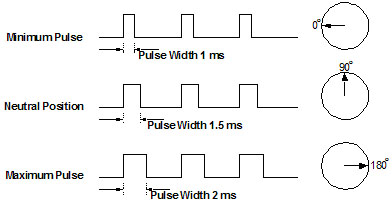
 servoja ohjataan lähettämällä niille muuttuvan leveyden pulssi. Tämän pulssin lähettämiseen käytetään ohjauslankaa., Tämän pulssin parametrit ovat, että sillä on minimipulssi, maksimipulssi ja toistotaajuus. Koska kierto rajoitteet servo, neutraali määritellään olemaan asema, jossa servo on täsmälleen sama määrä potentiaalisia kierto myötäpäivään kuin vastapäivään. On tärkeää huomata, että eri servot on eri rajoitukset niiden kierto, mutta he kaikki ovat neutraalissa asennossa, ja asento on aina noin 1,5 millisekuntia (ms).,
servoja ohjataan lähettämällä niille muuttuvan leveyden pulssi. Tämän pulssin lähettämiseen käytetään ohjauslankaa., Tämän pulssin parametrit ovat, että sillä on minimipulssi, maksimipulssi ja toistotaajuus. Koska kierto rajoitteet servo, neutraali määritellään olemaan asema, jossa servo on täsmälleen sama määrä potentiaalisia kierto myötäpäivään kuin vastapäivään. On tärkeää huomata, että eri servot on eri rajoitukset niiden kierto, mutta he kaikki ovat neutraalissa asennossa, ja asento on aina noin 1,5 millisekuntia (ms).,

kulma määräytyy ohjauslankaan kohdistuvan pulssin keston mukaan. Tätä kutsutaan pulssin leveyden Modulaatioksi. Servo odottaa näkevänsä pulssin 20 ms välein. pulssin pituus määrittää, kuinka pitkälle moottori kääntyy. Esimerkiksi 1,5 ms: n pulssi saa moottorin kääntymään 90 asteen asentoon (neutraaliin asentoon).
kun näitä servoja käsketään liikkumaan, ne siirtyvät asentoon ja pitävät tätä paikkaa., Jos ulkoinen voima työntää servoa vasten servon ollessa paikallaan, servo vastustaa siirtymästä pois tuosta asennosta. Servon enimmäisvoima on servon vääntömomenttiluokitus. Servot ei pidä asemaansa ikuisesti vaikka; – asennossa pulssi on toistettava ohjeistaa servo pysyä paikoillaan.
kun servolle lähetetään pulssi, joka on alle 1,5 ms, servo pyörii asentoon ja pitää ulostuloakseliaan joitakin asteita vastapäivään neutraalista pisteestä. Kun pulssi on leveämpi kuin 1,5 ms, tapahtuu päinvastoin., Pienin leveys ja suurin pulssin leveys, joka käskee servoa kääntymään kelvolliseen asentoon, ovat kunkin servon toimintoja. Eri tuotemerkeillä ja jopa saman merkin eri servoilla on erilaiset maksimit ja minimit. Yleensä pienin pulssi on noin 1 ms leveä ja suurin pulssi on 2 ms leveä.
Toinen parametri, joka vaihtelee servo servo on puolestaan tahtiin. Tämä on aika, jonka servo vaihtaa paikasta toiseen., Pahimmassa tapauksessa kääntämällä aika on, kun servo on kädessään pienin kierto ja se on käsketty mennä suurin kierto. Tämä voi kestää useita sekunteja erittäin suuri vääntömomentti servos.
näiden tietojen tarkoituksena on antaa yleiskuva servojen toiminnasta ja yhteydenpidosta niiden kanssa. Vaikka olemme ryhtyneet toimiin varmistaaksemme tiedon laadun täällä, ServoCity ei anna takeita esitetyistä tiedoista. Servocityä ei voida pitää vastuullisena tai vastuullisena annettujen tietojen käytöstä tai väärinkäytöstä., Jos sinulla on kysyttävää näistä tiedoista, lähetä sähköpostia [email protected].
miten Arduinon servoa ohjataan?
Miten voin Hallita Servo a Raspberry Pi?
vaikka Raspberry Pis voi tuottaa PWM-signaalin, ne eivät useinkaan pysty ylläpitämään puhdasta signaalia, koska ei ole omistettu ajastin. Jos ohjaat servoja Vadelma Pi suosittelemme saada servo hattu Vadelma pi.
How Do I Power A Servo?,
paras tapa virroittaa servoa on akku, jonka jännite on servosivujen speksitaulukossa määritellyn jännitealueen sisällä. Varmista käyttää terveellistä akkua, joka voi toimittaa enemmän kuin tarpeeksi virtaa. Koska virta vedetään eikä työnnetä, enemmän virtaa saatavilla kuin tarvitaan ei vahingoita servo (se on kuin ottaa enemmän kaasua kuin sinun täytyy saada jonnekin autossa). Servon moottorin teho syötetään punaiselle langalle., Voi olla hyödyllistä leikata punainen lanka (tai käyttää X-Acto vetää liitin kotelosta), jotta voit toimittaa virtaa erillään signaalin. Tämä mahdollistaisi vastaanottimen virrankulutuksen eri akulla kuin servosi, jos ne tarvitsevat erilaisia jännitteitä. Sen avulla voit myös kytkeä servon moottorin suoraan akusta, kun signaali tulee Arduinosta, koska Arduino-nastat eivät pysty käsittelemään sellaista virtaa, jota servo tarvitsee (ne yleensä max out at 40mA).
Miten lähetän signaalin pitkän matkan aikana?,
joskus signaalia pitkän matkan aikana lähetettäessä signaali voi hajota jännitepisaran ja sähkömagneettisen häiriön (EMI) vuoksi. Servosignaalin tehostin voi ratkaista nämä ongelmat ja tehdä signaalin lähettämisen helpoksi pitkän matkan johdossa.
miten kierrän servoa tietyn määrän (90°, 180°, jatkuva jne.)?
 kun sitä ohjataan Radio-ohjausjärjestelmällä, useimmat hobby servot tarjoavat 90° (45° kumpaan suuntaan) kiertoa suoraan laatikosta., Tätä voidaan joskus lisätä, jos radiojärjestelmäsi tarjoaa päätepisteen säätöjä tai servo-ohjaimessasi on 180° hyppytappi. Jos käytät Hitec digital servoja, haluat yksinkertaisesti ostaa kädessä pidettävän ohjelmoijan rotaation lisäämiseksi. Jos sinulla on Hitec tai Futaba analoginen servo, joka tarjoaa vain 90° kierto, määrä kierto voidaan joskus lisätä 180° suorittamalla yksinkertainen muutos.
kun sitä ohjataan Radio-ohjausjärjestelmällä, useimmat hobby servot tarjoavat 90° (45° kumpaan suuntaan) kiertoa suoraan laatikosta., Tätä voidaan joskus lisätä, jos radiojärjestelmäsi tarjoaa päätepisteen säätöjä tai servo-ohjaimessasi on 180° hyppytappi. Jos käytät Hitec digital servoja, haluat yksinkertaisesti ostaa kädessä pidettävän ohjelmoijan rotaation lisäämiseksi. Jos sinulla on Hitec tai Futaba analoginen servo, joka tarjoaa vain 90° kierto, määrä kierto voidaan joskus lisätä 180° suorittamalla yksinkertainen muutos.
Huomautus: Voit ostaa meiltä Hitec servoja, jotka on valmiiksi muokattu omassa tuotantolaitoksessamme yksittäisillä Hitec servo-sivuilla., Tämä muutos poistaa kaikki ServoCity ja Hitec takuut.
Miten vaihdan Servo-vaihteiston?
miten Servonopeutta mitataan?
miten Servomomomenttia mitataan?
mihin Servon” suunta ” viittaa?
kaikki servot kiertävät myötäpäivään ja vastapäivään. Servon pyörimissuunta riippuu servon vastaanottamasta signaalista. Kaikki servot eivät täsmää rotaatiosuuntaan suoraan laatikosta., Jos kytket Hitec servon Radio-ohjausvastaanottimeen tai servo-ohjaimeen ja käsket servoa kääntymään oikealle (myötäpäivään), se siirtyy oikealle. Jos sitten kytket Futaba servon samaan vastaanottimeen tai servo-ohjaimeen ja käsket sitä menemään samaan suuntaan kuin Hitec servo teki, se liikkuu vastakkaiseen suuntaan (vastapäivään). Tämä on helppo korjata useimmissa Radio-ohjausjärjestelmissä, koska niissä on servo-peruutus
– toiminto lähettimessä., Tämä ero valmistajien välillä on syy, kukin servo on spec huuteli suuntaan, että servo siirtyy yhä PWM-signaali.
mikä on Servo Spline?
servon hammastettua ulostuloakselia kutsutaan yleisesti servo-splineksi. Erittely kaikki erilaisia servo urat on servot myymme, tutustu Servo Spline merkintä meidän sanasto.