perusajatuksena PID-säädin on lukea anturi, sitten laskea halutun toimilaitteen lähtö laskemalla proportional, integral ja derivative vastauksia ja summaamalla nämä kolme osaa laskea tuotoksen. Ennen kuin alamme määritellä parametrit PID-säädin, katsotaan, mitä suljetun silmukan järjestelmä on ja jotkut terminologia liittyy siihen.,
Suljetun Silmukan Järjestelmä
tyypillinen ohjaus järjestelmä, prosessi muuttuja on järjestelmän parametri, joka täytyy hallita, kuten lämpötila (°C), paine (psi) tai virtaus (litraa/minuutti). Sensoria käytetään prosessimuuttujan mittaamiseen ja palautteen antamiseen ohjausjärjestelmälle. Asetusarvo on haluttu tai komento-arvo prosessi muuttuja, kuten 100 astetta, jos lämpötila ohjaus järjestelmä., Milloin tahansa, ero prosessi, muuttuja ja asettaa vaiheessa on käytetty ohjausjärjestelmä algoritmi (compensator), määrittää halutun toimilaitteen lähtö drive järjestelmä (kasvi). Esimerkiksi, jos mitattu lämpötila prosessin muuttuja on 100 ºC ja halutun lämpötilan asetusarvo on 120 ° c, sitten toimilaitteen lähtö määritelty valvonta-algoritmi voidaan ajaa lämmitin. Ajo-toimilaitteen päälle lämmitin aiheuttaa järjestelmän tulee lämpimämpi, ja johtaa lämpötilan nousuun, prosessi muuttuja., Tätä kutsutaan suljetun silmukan valvontajärjestelmä, koska prosessin lukemisen anturit antaa jatkuvaa palautetta ja laskemalla halutun toimilaitteen lähtö toistetaan jatkuvasti ja kiinteä silmukka hintaan kuten kuvassa 1 esitetään.
monissa tapauksissa toimilaitteen ulostulo ei ole ainoa signaali, jolla on vaikutusta järjestelmään. Esimerkiksi lämpötilakammiossa saattaa olla viileän ilman lähde, joka joskus puhaltaa kammioon ja häiritsee lämpötilaa.Tällaisesta termistä käytetään nimitystä häiriö., Pyrimme yleensä suunnittelemaan ohjausjärjestelmän minimoidaksemme häiriöiden vaikutuksen prosessimuuttujaan.
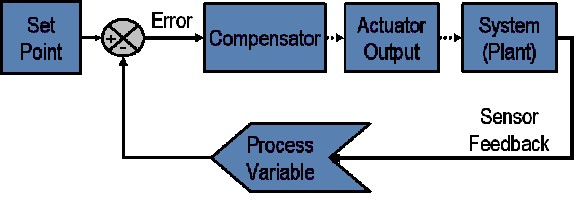
Kuva 1: lohkokaavio tyypillinen suljetun silmukan järjestelmä.
terminaalien määrittely
ohjaussuunnitteluprosessi alkaa suorituskykyvaatimusten määrittelyllä. Valvontajärjestelmän suorituskykyä mitataan usein soveltamalla vaihe toiminto kuin asetettu kohta komento muuttuja, ja sitten mitataan vaste prosessin muuttuja. Yleisesti vastetta kvantifioidaan mittaamalla määriteltyjä aaltomuodon ominaisuuksia., Nousuaika on aika, jonka järjestelmä kestää mennä 10%: sta 90% vakaan tilan, tai lopullinen arvo. Prosentuaalinen ylitys on määrä, jonka prosessimuuttuja ylittää lopullisen arvon prosentteina lopullisesta arvosta. Selvitysaika on aika, joka tarvitaan prosessimuuttujan asettumiseen tiettyyn prosenttiosuuteen (yleisesti 5%) lopullisesta arvosta. Vakaan tilan virhe on lopullinen ero prosessimuuttujan ja asetuspisteen välillä. Huomaa, että näiden määrien tarkka määritelmä vaihtelee teollisuudessa ja korkeakouluissa.,
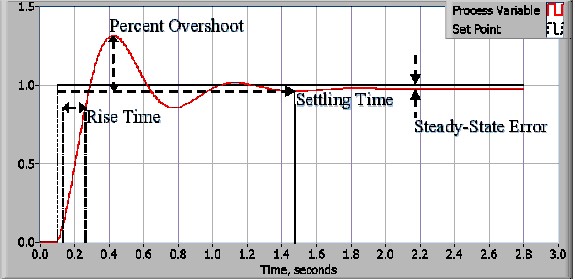
Kuva 2: Vastaus tyypillinen PID suljetun silmukan järjestelmä.
käytettyään yhtä tai kaikkia näitä määriä valvontajärjestelmän suorituskykyvaatimusten määrittelemiseksi on hyödyllistä määritellä huonoimmat olosuhteet, joissa valvontajärjestelmän odotetaan täyttävän nämä suunnitteluvaatimukset. Usein järjestelmässä on häiriö, joka vaikuttaa prosessimuuttujaan tai prosessimuuttujan mittaamiseen. On tärkeää suunnitella ohjausjärjestelmä, joka toimii tyydyttävästi pahimmissa tapauksissa., Mittana siitä, kuinka hyvin valvontajärjestelmä pystyy voittamaan häiriöiden vaikutukset, kutsutaan ohjausjärjestelmän häiriönsietokykyä.
joissakin tapauksissa, vastaus järjestelmä antaa ohjauslähdön voi muuttua ajan myötä tai suhteessa johonkin muuttujaan. Epälineaarinen järjestelmä on järjestelmä, jossa valvonta parametrit, jotka tuottavat halutun vasteen yksi toimintapiste ei voi tuottaa tyydyttävää vastausta, toinen toimintapiste., Esimerkiksi osittain nesteellä täytetty kammio reagoi lämmittimen ulostuloon huomattavasti nopeammin, kun se on lähes tyhjä kuin lähes täynnä nestettä. Mitta, miten hyvin ohjaus järjestelmä sietää häiriöitä ja nonlinearities kutsutaan luotettavuutta valvonta järjestelmään.
joissakin järjestelmissä esiintyy ei-toivottua käytöstä nimeltä deadtime. Deadtime on viive sen välillä, milloin prosessimuuttuja muuttuu, ja milloin muutos voidaan havaita., Jos esimerkiksi lämpötila-anturi sijoitetaan kauas kylmän veden nesteen imuventtiilistä, se ei mittaa lämpötilan muutosta välittömästi, jos venttiili avataan tai suljetaan. Deadtime voi johtua myös järjestelmän tai lähtö toimilaite, joka on hidas reagoimaan ohjaus komento, esimerkiksi venttiili, joka on hidas avata tai sulkea. Kemiantehtaissa yleinen kuolonajan lähde on putkistojen läpi virtaavan nesteen aiheuttama viive.
Loop cycle on myös tärkeä suljetun silmukan järjestelmän parametri. Ohjausalgoritmiin soitettujen puhelujen välinen aika on silmukan kierrosaika., Järjestelmät, jotka muuttuvat nopeasti tai joilla on monimutkainen käyttäytyminen, vaativat nopeampia säätösilmukkanopeuksia.
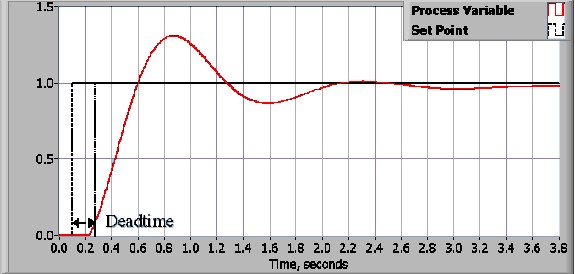
Kuva 3: Vastaus suljetun silmukan järjestelmä, jossa deadtime.
Kun suorituskykyä koskevat vaatimukset on määritelty, on aika tutkia järjestelmän ja valita sopiva ohjausjärjestelmä. Useimmissa sovelluksissa PID-valvonta tuottaa vaaditut tulokset