Sisällysluettelo
ohjausjärjestelmä
valvontajärjestelmiä pelata elintärkeä rooli meidän päivä-to-day elämää. Ajatus automaattisesta ohjausjärjestelmästä on perus-ja hyvin ristiriitainen elämämme kaikilla osa-alueilla. Automaattisella ohjausjärjestelmällä on tärkeä rooli insinööritaitojen edistämisessä ja parantamisessa.,
järjestelmä on yhdistelmä laitteita ja komponentteja kytketty yhteen jonkinlainen säännöllinen vuorovaikutus toimimaan yhdessä ja suorittaa tietty tavoite. Järjestelmä voi olla fyysinen, biologinen, taloudellinen ja vastaava.
termi control tarkoittaa säädellä, ohjata tai komentaa. Näin ollen ohjausjärjestelmä voidaan määritellä yhdistelmäksi laitteita ja komponentteja, jotka on kytketty tai liitetty toisiinsa niin, että se voi hallita, ohjata tai säädellä itseään tai muuta järjestelmää.,
ohjausjärjestelmiä käytetään monissa sovelluksissa, esimerkiksi lämpötilan, nestetason, asennon, nopeuden, Virtauksen, paineen, kiihtyvyyden jne.säätelyssä.
ohjausjärjestelmän ominaisuudet
ohjausjärjestelmän tärkein ominaisuus on, että järjestelmän syötteen ja ulostulon välillä pitäisi olla selkeä matemaattinen suhde. Kun järjestelmän syötön ja tuotoksen välinen suhde voidaan esittää lineaarisella suhteellisuudella, järjestelmää kutsutaan lineaariseksi ohjausjärjestelmäksi., Uudelleen, kun suhde input-ja output-ei voi edustaa yhden lineaarinen suhteellisuus, eikä input-ja output-liittyvät joidenkin ei-lineaarinen suhde, järjestelmä on tarkoitettu ei-lineaarinen ohjausjärjestelmä.
hyvän ohjausjärjestelmän vaatimukset
tarkkuus: tarkkuus on mittauksen toleranssi ja määrittelee laitteen tavanomaisissa käyttöolosuhteissa käytettävien virheiden rajat. Tarkkuutta voidaan parantaa käyttämällä palauteelementtejä., Valvontajärjestelmän virheilmaisimen tarkkuuden lisäämiseksi ohjausjärjestelmässä olisi oltava virheilmaisin.
herkkyys: ohjausjärjestelmän parametrit muuttuvat aina ympäröivien olosuhteiden, sisäisen häiriön tai muiden parametrien muuttuessa. Muutos voidaan ilmaista herkkyytenä. Valvontajärjestelmän olisi oltava herkkä tällaisille parametreille, mutta herkkä vain tulosignaaleille.
kohina: ei-toivottu tulosignaali tunnetaan nimellä melu. Hyvän ohjausjärjestelmän pitäisi pystyä vähentämään meluvaikutusta paremman suorituskyvyn vuoksi.,
Stabiilisuus: se on valvontajärjestelmän tärkeä ominaisuus. Sillä bounded input-signaali, lähtö täytyy olla rajoittuu, ja jos tulo on nolla, niin lähtö on nolla, niin tällainen valvonta järjestelmän sanotaan olevan vakaa järjestelmä.
kaistanleveys: käyttötaajuusalue päättää ohjausjärjestelmän kaistanleveyden. Kaistanleveyden tulisi olla mahdollisimman suuri hyvän ohjausjärjestelmän taajuusvasteen kannalta.
nopeus: se on aika, jonka ohjausjärjestelmä ottaa saavuttaakseen vakaan ulostulonsa. Hyvällä ohjausjärjestelmällä on suuri nopeus., Tällaisen järjestelmän ohimenevä aika on hyvin pieni.
oskillaatio: pieni määrä värähtelyä tai jatkuvaa ulostulon värähtelyä pyrkii osoittamaan järjestelmän vakaaksi.
perusosat ohjausjärjestelmä
perusosat valvonta järjestelmä voidaan esittää seuraavasti:
- viittaus input-elementti, joka aiheuttaa command signaali;
- palaute-elementti, joka tuottaa palautetta signaalin;
- virhe detector;
- ohjain;
- ohjattu järjestelmä; ja
- output-signaali, joka on, ohjattu lähtö.,
Nämä komponentit näkyvät muodossa järjestelmän lohkokaavio kuten alla olevassa kuvassa, ja se on kuvattu seuraavasti.
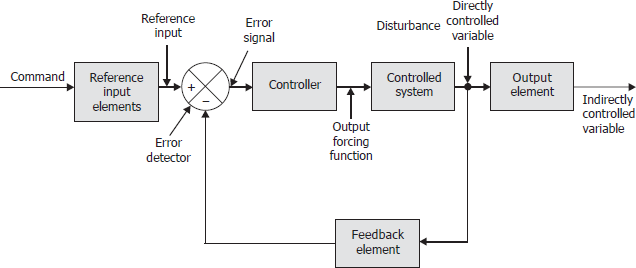
- Viittaus Input-Elementtejä: ne muodostavat kannan palautetta control-järjestelmä, joka luo yhteyden komento ja tiettyjen viittaus tulo.,
- Komento: Komento on tarkoituksella otettu käyttöön signaalin perustettu joitakin keinoja, ulkoinen ja riippumaton palautetta valvonta järjestelmään harkitaan.
- Reference Input: It is a signal established as a standard of comparison for a feedback control system sen relation to the command.
- Virhe Ilmaisin: Se on elementti, jossa yksi järjestelmä muuttuja (takaisinkytkentäsignaalin) vähennetään toisen muuttujan (viittaus signaali) saadaan kolmas muuttuja (virhe signaali). Sitä kutsutaan myös vertailijaksi.,
- Palaute-Elementti: Palaute signaali on funktio ohjattu lähtö, joka on verrattuna viittaus signaali saada toimilaite signaali.
- Error Signal: It is an algebrallinen summa of the reference input and the primary feedback.
- ohjain: ohjain on elementti, jota tarvitaan asianmukaisen ohjaussignaalin tuottamiseen.
- Tuotos Pakottaa Toiminto: Se on tila, joka on monipuolinen funktiona signaalin toimilaite siten, että muutos arvo kontrolloitu muuttuja.,
- ohjattu järjestelmä: se on elin, prosessi tai kone, jonka tiettyä tilaa on valvottava, esimerkiksi avaruusalus, reaktori, kattila, CNC-kone jne.
- kontrolloitu muuttuja: se on muuttuja, joka mitataan ja kontrolloidaan suoraan. Häiriö on tulo muu kuin komento, jolla on taipumus vaikuttaa kontrolloidun muuttujan arvoon.
- Lähtöelementit: nämä ovat elementtejä, jotka vahvistavat suoraan kontrolloidun muuttujan ja välillisesti kontrolloidun muuttujan välisen suhteen.,
Luokittelu ohjausjärjestelmä
Open-Loop Control System
control-järjestelmä, jota voi säätää itse muutoksia kutsutaan open-loop control system. Yleensä manuaaliset ohjausjärjestelmät ovat avoimen kierron järjestelmiä. Avoimen silmukan ohjausjärjestelmän lohkokaavio on esitetty alla olevassa kuvassa.,

tässä R(t) on tulosignaali, u(t) on ohjaussignaali/aktivointi signaali ja C(T) on lähtösignaali.
tässä järjestelmässä, lähtö pysyy muuttumattomana jatkuva tulo. Poikkeaman sattuessa käyttäjän on vaihdettava syöttö manuaalisesti., Open-loop control system sopii kun on toleranssi vaihtelu järjestelmään ja kun järjestelmä parametrin vaihtelu voidaan käsitellä riippumatta ympäristön olosuhteet.
avoimen kierron järjestelmän edut
- nämä järjestelmät ovat rakenteeltaan ja rakenteeltaan yksinkertaisia.
- avoimen kierron järjestelmät ovat taloudellisia.
- nämä järjestelmät ovat huollon kannalta helppoja.
- yleensä näissä järjestelmissä ei ole juurikaan ongelmia vakauden kanssa.
- näitä järjestelmiä on kätevä käyttää, kun ulostuloa on vaikea mitata.,
Haitat
- Nämä järjestelmät eivät ole tarkkoja ja luotettavia, koska niiden tarkkuus riippuu kalibroinnin tarkkuus.
- näissä järjestelmissä saadaan epätarkkoja tuloksia parametrivaihteluista eli sisäisistä häiriöistä.
- ohjaimen uudelleenkalibrointi on tarpeen aika ajoin laadun ja tarkkuuden ylläpitämiseksi.
Closed-Loop Control System
mikä Tahansa järjestelmä, joka voi reagoida muutoksiin ja tehdä korjauksia itse tunnetaan suljetun silmukan valvontajärjestelmä., Ainoa ero avoimen silmukan ja suljetun silmukan järjestelmien välillä on palautetoiminto. Suljetun silmukan ohjausjärjestelmän lohkokaavio on esitetty alla olevassa kuvassa.
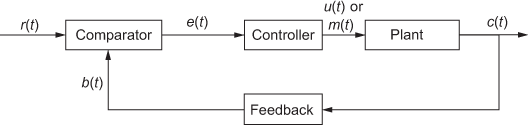
Tässä, lähtö kone syötetään takaisin vertailuryhmässä (virhe detector). Lähtösignaalia verrataan referenssituloon r (t) ja virhesignaali e(t) lähetetään ohjaimeen., Virheen perusteella ohjain säätää Ilmastointilaitteen syöttöä . Tätä prosessia jatketaan, kunnes virhe mitätöidään. Sekä manuaalinen että automaattinen ohjaus voidaan toteuttaa suljetun silmukan järjestelmässä. Järjestelmän kokonaishyöty pienenee palautteen vuoksi. Voiton vähentämisen kompensoimiseksi järjestelmä voi joskus muuttua epävakaaksi, jos vahvistin otetaan käyttöön lisäämään järjestelmän saamista.
lähisilmukkajärjestelmän
- edut näissä järjestelmissä tarkkuus on erittäin korkea mahdollisen virheen korjaamisen vuoksi.,
- koska nämä järjestelmät aistivat ympäristön muuttuvan sekä sisäiset häiriöt, virhettä muutetaan.
- näissä järjestelmissä epälineaarisuuden vaikutus on vähäisempi.
- näillä järjestelmillä on suuri kaistanleveys eli korkea toimintataajuusvyöhyke.
- näissä järjestelmissä on automaatiotiloja.
Haitat
- järjestelmät ovat monimutkaisia suunnittelussa.
- lähisilmukkajärjestelmät ovat costliereja.
- nämä järjestelmät voivat olla epävakaita.,
joitakin esimerkkejä avoimen kierron ja suljetun kierron ohjausjärjestelmistä ovat seuraavat:
- liikennevalojärjestelmien toiminta vaihtelee. Osa järjestelmistä on suljettuja ja osa avoimia. Avoimen kierron tyypissä on ajoitusmekanismi, jonka avulla valoja voidaan vaihtaa säännöllisin väliajoin liikennemäärästä riippumatta. Suljetun kierron tyypissä kuitenkin seurataan liittymien kautta kulkevan liikenteen määrää (sähköisesti tai muuten), ja ”punaisen” ja ”vihreän” olosuhteiden kestoa säädetään risteyksen kunkin osan osalta vastaavasti.,
- esimerkki avoimen kierron järjestelmän toiminnasta on autopesukone, jossa kaikki autot saavat saman verran pesua riippumatta siitä, kuinka likaisia ne ovat. Tässä lähtö on autojen puhtaus, joka vastaa koneen tiettyä asetusta (veden määrä ja pesuaika). Ihminen, kuitenkin, joka pesee autoja, automaattisesti varmistaa, että likaisempaa autot saavat enemmän huomiota kuin toiset. Vastuullisen ihmisen suorittama auton pesu on siis suljetun kierron ohjausjärjestelmä. Tavallinen pesukone on avoimen kierron järjestelmä.,
- jääkaappi on suljetun kierron järjestelmä. Sen lämpötilaa mitataan termostaatilla, joka kytkee moottorin päälle, kun lämpötila nousee halutun arvon yläpuolelle ja sammuttaa moottorin, kun lämpötila jälleen saavuttaa halutun arvon.
- huoneen valaistus on avoimen kierron järjestelmä. Kun valo on päällä, se pysyy päällä (kunnes se kytketään pois päältä) riippumatta siitä, onko huone tumma vai vaalea.
Erot open-loop-ja closed-loop-järjestelmät
| S.,Ei. | Open-loop-Järjestelmä | Suljetun silmukan Järjestelmä | |
| 1 | palaute-elementti on poissa. | palauteelementti aina läsnä. | |
| 2 | virheenilmaisinta ei ole. | virheilmaisin on aina läsnä. | |
| 3 | avoimen kierron järjestelmä on yleensä vakaa. | suljetun kierron järjestelmä voi muuttua epävakaaksi tietyissä olosuhteissa. |
|
| 4 | niihin voi vaikuttaa järjestelmän epälineaarisuus. | ne voivat säätää järjestelmässä esiintyvien ei-lineaaristen vaikutusten vaikutusta., | |
| 5 | se on helppo rakentaa. | se on mutkistanut rakentamista. | |
| 6 | se on taloudellinen. | se tulee kalliiksi. | |
| 7 | Se on pieni kaistanleveys. | sillä on suuri kaistanleveys. | |
| 8 | ne ovat yleensä epätarkkoja. | ne ovat tarkkoja. | |
| 9 | sillä on vähemmän huoltoa. | sillä on enemmän huoltoa. | |
| 10 | se on epäluotettava. | se on luotettava., | |
| 11 | Examples: Washing machine, fixed time traffic control system, room heater, etc | Examples: Servomotor control, generator output voltage control system, refrigerator, biological system, etc. |
Other Types of Control Systems
Linear and Non-linear
A linear system is one that obeys the principle of superposition., Superpositioperiaatteen mukaan kahden eri pakotefunktion samanaikaisen soveltamisen tuottama vaste on yhtä suuri kuin yksittäisten vastausten summa.
epälineaariset järjestelmät eivät noudata superpositioperiaatetta. Lähes kaikki käytännön järjestelmät ovat jossain määrin epälineaarisia. Epälineaarisuudet otetaan käyttöön järjestelmän komponenttien kyllästysvaikutuksen, frictionaalisten voimien, vaihteistojunien välisen leikin, mekaanisten kytkösten, elektronisten komponenttien, kuten tehovahvistimien, transistorien, ei-lineaaristen ominaisuuksien vuoksi., käyttää., Lineaaristen järjestelmien hallinta on helppoa verrattuna epälineaaristen järjestelmien hallintaan.
aika-invariantti ja aika-vaihteleva
aika-invariantti ohjausjärjestelmä on sellainen, jonka parametrit eivät vaihtele ajan kanssa. Tällaisen järjestelmän vaste on riippumaton ajasta, jolloin syötettä käytetään. Esimerkiksi sähköverkon vastus, induktanssi ja kapasitanssi ovat ajasta riippumattomia.
aika-vaihteleva järjestelmä on sellainen, jossa yksi tai useampi parametri vaihtelee ajan mukaan. Vaste riippuu syöttöajankohdasta., Tilaa ajoneuvon hallinnan järjestelmä, jossa massa vähenee ajan myötä, kuten polttoainetta, se kuljettaa kuluu lennon aikana, on esimerkki time-varying järjestelmä.
Jatkuvatoiminen ja diskreetti
jatkuvatoimisissa ohjausjärjestelmissä kaikki järjestelmäparametrit ovat yhtäjaksoisen ajan funktio, t. diskreetti-aikakontrollissa on yksi tai useampi muuttuja, jotka tunnetaan vain diskreeteillä aikakontrolleilla.
jatkuva tai jatkuva data on sellainen, jossa järjestelmän eri osien signaalit ovat ajan jatkuvia funktioita. Nämä signaalit ovat yhtäjaksoisia signaaleja., Esimerkiksi d.C.-Moottorin nopeudensäätöä harkitessamme tiedämme, että ulostulo eli radioiden pyöriminen sekunnissa on jännitteen ja virran funktio, joka on annettu syötteenä sille jatkuvasti. Tällainen järjestelmä ottaa jatkuvan ajan syötön ja tarjoaa jatkuvan ajan ulostulon.
single-Input–Single-Output (SISO) ja Multi-Input–Multi-Output (MIMO)
järjestelmää, jossa on yksi input-Single–output control system. Toisin sanoen on vain yksi komento ja yksi ohjattu ulostulo.,
järjestelmää, jossa on useita syöttöjä ja useita lähtöjä, kutsutaan monisyöttöiseksi monisyöttöiseksi ohjausjärjestelmäksi. Esimerkiksi kattilarummun tasonsäätö, robottivarren ohjaus jne. Robottivarsi suorittaa useita toimintoja useilla panoksilla. Näitä monifunktioita kutsutaan vapauden asteeksi.
Niputetaan Parametri ja Distributed Parameter
Hallita järjestelmiä, jotka voidaan kuvata tavallisten differential equations niputetaan parametri valvontajärjestelmien ottaa huomioon, että distributed parameter valvontajärjestelmät on kuvattu osittainen differential equations., Pitkän voimajohdon eli resistanssin, induktanssin ja kapasitanssin parametrit jaetaan pitkin linjaa, mutta niitä voidaan pitää kertyneinä parametreina tietyissä kohdissa.
Deterministinen ja Stokastinen
ohjaus-järjestelmä on deterministinen, jos vastaus on ennustettavissa ja toistettavissa. Jos ei, ohjausjärjestelmä on stokastinen ohjausjärjestelmä, joka sisältää satunnaismuuttujan parametrit.,
Staattinen ja Dynaaminen Järjestelmät
järjestelmä on nimeltään dynaaminen, tai aika-riippuvainen, jos sen nykyinen teho riippuu viime input, kun taas staattinen järjestelmä on yksi, jonka nykyinen ulostulo riippuu vain nykyisestä input.