Inhaltsverzeichnis
Control System
Steuerungssysteme spielen eine wichtige Rolle in unserem täglichen Leben. Die Vorstellung eines automatischen Steuerungssystems ist grundlegend und in jeder Facette unseres Lebens gut gemischt. Das automatische Steuerungssystem spielt eine wichtige Rolle bei der Weiterentwicklung und Verbesserung der technischen Fähigkeiten.,
Ein System ist eine Kombination von Geräten und Komponenten, die durch eine Form regelmäßiger Interaktionen miteinander verbunden sind, um gemeinsam zu handeln und ein bestimmtes Ziel zu erreichen. Das System kann physisch, biologisch, wirtschaftlich und dergleichen sein.
Der Begriff Steuerung bedeutet Regeln, lenken oder befehlen. Somit kann ein Steuerungssystem als eine Kombination von Geräten und Komponenten definiert werden, die verbunden oder verwandt sind, um sich selbst oder ein anderes System zu befehlen, zu lenken oder zu regulieren.,
Steuerungssysteme werden in vielen Anwendungen eingesetzt, beispielsweise zur Steuerung von Temperatur, Flüssigkeitsstand, Position, Geschwindigkeit, Durchfluss, Druck, Beschleunigung usw.
Merkmale eines Steuerungssystems
Das Hauptmerkmal eines Steuerungssystems besteht darin, dass eine klare mathematische Beziehung zwischen Eingabe und Ausgabe des Systems bestehen sollte. Wenn die Beziehung zwischen Eingang und Ausgang des Systems durch eine lineare Proportionalität dargestellt werden kann, wird das System als lineares Steuersystem bezeichnet., Auch wenn die Beziehung zwischen Eingang und Ausgang nicht durch eine einzige lineare Proportionalität dargestellt werden kann, sondern die Eingabe und Ausgabe durch eine nichtlineare Beziehung verbunden sind, wird das System als nichtlineares Steuersystem bezeichnet.
Anforderungen an ein gutes Steuerungssystem
Genauigkeit: Genauigkeit ist die Messtoleranz des Instruments und definiert die Grenzen der Fehler, die beim Einsatz unter normalen Betriebsbedingungen auftreten. Die Genauigkeit kann durch Verwendung von Rückkopplungselementen verbessert werden., Um die Genauigkeit eines Steuersystems zu erhöhen, sollte ein Fehlerdetektor im Steuersystem vorhanden sein.
Empfindlichkeit: Die Parameter eines Steuerungssystems ändern sich immer mit der Änderung der Umgebungsbedingungen, interner Störungen oder anderer Parameter. Diese Änderung kann in Bezug auf die Empfindlichkeit ausgedrückt werden. Jedes Steuerungssystem sollte gegenüber solchen Parametern unempfindlich, aber nur gegenüber Eingangssignalen empfindlich sein.
Rauschen: Ein unerwünschtes Eingangssignal wird als Rauschen bezeichnet. Ein gutes Kontrollsystem sollte in der Lage sein, den Geräuscheffekt für eine bessere Leistung zu reduzieren.,
Stabilität: Es ist ein wichtiges Merkmal der Steuerung. Für das begrenzte Eingangssignal muss der Ausgang begrenzt sein und wenn der Eingang Null ist, muss der Ausgang Null sein, dann wird ein solches Steuersystem als stabiles System bezeichnet.
Bandbreite: Ein Betriebsfrequenzbereich bestimmt die Bandbreite der Steuerung. Die Bandbreite sollte für den Frequenzgang des guten Steuerungssystems so groß wie möglich sein.
Geschwindigkeit: Es ist die Zeit, die das Steuerungssystem benötigt, um seine stabile Ausgabe zu erreichen. Ein gutes Kontrollsystem besitzt hohe Geschwindigkeit., Die Übergangszeit für ein solches System ist sehr gering.
Schwingung: EINE kleine anzahl von schwingungen oder konstante schwingung der ausgang tendenziell zeigen das system stabil zu sein.
Grundkomponenten eines Steuerungssystems
Die Grundkomponenten eines Steuerungssystems können dargestellt werden durch:
- Referenzeingangselement, das das Befehlssignal verursacht;
- Feedback-Element, das das Rückkopplungssignal erzeugt;
- Fehlerdetektor;
- Controller;
- gesteuertes System; und
- das Ausgangssignal, dh der gesteuerte Ausgang.,
Diese Komponenten werden in Form eines Systemblockdiagramms wie in der folgenden Abbildung dargestellt und wie folgt beschrieben.
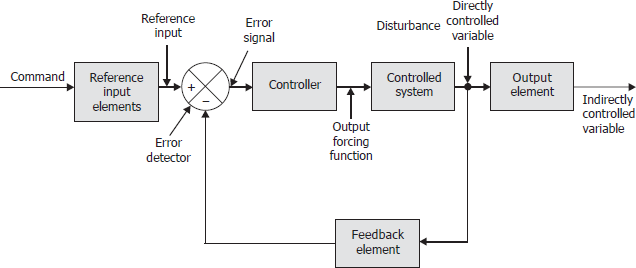
- Referenzeingabeelemente: Diese stellen die Position des Rückkopplungssteuerungssystems dar, die die Beziehung zwischen dem Befehl und bestimmten Referenzeingaben herstellt.,
- Befehl: Befehl ist ein bewusst eingeführtes Signal, das auf irgendeine Weise außerhalb und unabhängig von dem betrachteten Rückkopplungssteuerungssystem erzeugt wird.
- Referenzeingang: Es ist ein Signal, das aufgrund seiner Beziehung zum Befehl als Vergleichsstandard für ein Rückkopplungssteuerungssystem festgelegt wurde.
- Fehlerdetektor: Es ist ein Element, bei dem eine Systemvariable (Rückkopplungssignal) von einer anderen Variablen (Referenzsignal) subtrahiert wird, um die dritte Variable (Fehlersignal) zu erhalten. Es wird auch Komparator genannt.,
- Rückkopplungselement: Rückkopplungssignal ist eine Funktion des gesteuerten Ausgangs, die mit dem Referenzsignal verglichen wird, um das Betätigungssignal zu erhalten.
- Fehlersignal: Es ist eine algebraische Summe des Referenzeingangs und der primären Rückkopplung.
- Controller: Der Controller ist ein Element, das zur Erzeugung des entsprechenden Steuersignals benötigt wird.
- Output Forcing-Funktion: Es ist die Bedingung, die als Funktion des Betätigungssignals variiert wird, um den Wert der gesteuerten Variablen zu ändern.,
- Gesteuertes System: Es ist ein Körper, ein Prozess oder eine Maschine, von der eine bestimmte Bedingung gesteuert werden soll, z. B. ein Raumfahrzeug, ein Reaktor, ein Kessel, eine CNC-Maschine usw.
- Kontrollierte Variable: Es ist eine Variable, die direkt gemessen und gesteuert wird. Die Störung ist eine andere Eingabe als ein Befehl, der dazu neigt, den Wert der gesteuerten Variablen zu beeinflussen.
- Ausgabeelemente: Dies sind die Elemente, die die Beziehung zwischen der direkt gesteuerten Variablen und der indirekt gesteuerten Variablen herstellen.,
Klassifizierung des Steuerungssystems
Open-Loop-Steuerungssystem
Ein Steuerungssystem, das sich nicht an die Änderungen anpassen kann, wird als Open-Loop-Steuerungssystem bezeichnet. Im Allgemeinen sind manuelle Steuerungssysteme Open-Loop-Systeme. Das Blockdiagramm des Open-Loop-Steuerungssystems ist in der folgenden Abbildung dargestellt.,

Hier ist r(t) das Eingangssignal, u(t) das Steuersignal/Betätigungssignal und c(t) das Ausgangssignal.
In diesem System bleibt die Ausgabe unverändert für konstante Eingabe. Im Falle einer Diskrepanz sollte die Eingabe manuell von einem Bediener geändert werden., Ein Open-Loop-Steuerungssystem ist geeignet, wenn Schwankungstoleranz im System besteht und wenn die Systemparametervariation unabhängig von den Umgebungsbedingungen gehandhabt werden kann.
Vorteile von Open-loop-System
- Diese Systeme sind einfach in der Konstruktion und design.
- Die open-loop-Systeme sind wirtschaftlich.
- Diese Systeme sind wartungsfreundlich.
- Normalerweise sind diese Systeme mit Stabilitätsproblemen nicht sehr beunruhigt.
- Diese Systeme sind bequem zu bedienen, wenn die Ausgabe schwer zu messen ist.,
Nachteile
- Diese Systeme sind nicht genau und zuverlässig, da ihre Genauigkeit von der Genauigkeit der Kalibrierung abhängt.
- In diesen Systemen werden ungenaue Ergebnisse mit Parametervariationen, d. H. Internen Störungen, erhalten.
- Zur Aufrechterhaltung von Qualität und Genauigkeit ist von Zeit zu Zeit eine Neukalibrierung der Steuerung erforderlich.
Closed-Loop-Steuerung
Jedes System, das auf die Änderungen reagieren und Korrekturen selbst vornehmen kann, wird als Closed-Loop-Steuerung bezeichnet., Der einzige Unterschied zwischen Open-Loop-und Closed-Loop-Systemen ist die Rückkopplungswirkung. Das Blockdiagramm eines geschlossenen Regelkreises ist in der folgenden Abbildung dargestellt.
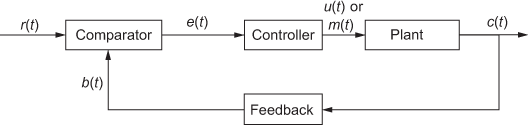
Hier wird die Ausgabe der Maschine an einen Komparator (Fehlerdetektor) zurückgeführt. Das Ausgangssignal wird mit dem Referenzeingang r(t) verglichen und das Fehlersignal e(t) wird an die Steuerung gesendet., Basierend auf dem Fehler passt der Controller den Eingang der Klimaanlage an . Dieser Vorgang wird fortgesetzt, bis der Fehler aufgehoben wird. Sowohl manuelle als auch automatische Steuerungen können in einem geschlossenen System implementiert werden. Die Gesamtverstärkung eines Systems wird durch das Vorhandensein von Feedback reduziert. Um die Reduzierung der Verstärkung auszugleichen, kann das System manchmal instabil werden, wenn ein Verstärker eingeführt wird, um die Verstärkung eines Systems zu erhöhen.
Vorteile des Close-Loop-Systems
- Bei diesen Systemen ist die Genauigkeit aufgrund der Korrektur eines auftretenden Fehlers sehr hoch.,
- Da diese Systeme Umgebungsänderungen sowie interne Störungen wahrnehmen, wird der Fehler geändert.
- Es gibt einen reduzierten Effekt der Nichtlinearität in diesen Systemen.
- Diese Systeme haben eine hohe Bandbreite, dh eine hohe Betriebsfrequenzzone.
- Es gibt Einrichtungen der Automatisierung in diesen Systemen.
Nachteile
- Die Systeme sind kompliziert konstruiert.
- Die close-loop-Systeme sind teurer.
- Diese Systeme können instabil sein.,
Einige Beispiele für Open-Loop-und Closed-Loop-Steuerungssysteme sind wie folgt:
- Ampelsysteme variieren im Betrieb. Einige Systeme sind Closed-Loop und einige sind Open-Loop. Im Open-Loop-Typ gibt es einen Zeitmechanismus, der eingestellt ist, um die Lichter in regelmäßigen Abständen unabhängig vom Verkehrsaufkommen zu schalten. Beim Closed-Loop-Typ wird jedoch die Menge des durch die Kreuzungen fließenden Verkehrs überwacht (elektronisch oder auf andere Weise), und die Dauer der „roten“ und „grünen“ Bedingungen wird für jeden Teil der Kreuzung entsprechend angepasst.,
- Ein Beispiel für die Wirkung eines Open-Loop-Systems ist eine Autowaschmaschine, bei der alle Autos die gleiche Waschmenge erhalten, unabhängig davon, wie schmutzig sie sind. Hier ist die Ausgabe die Sauberkeit der Autos, die einer bestimmten Einstellung der Maschine entspricht (Wassermenge und Waschzeit). Ein Mensch, der Autos wäscht, sorgt jedoch automatisch dafür, dass die schmutzigeren Autos mehr Aufmerksamkeit erhalten als andere. Das Waschen von Autos durch einen verantwortlichen Menschen ist daher ein geschlossenes Kontrollsystem. Eine gewöhnliche Waschmaschine ist ein offenes System.,
- Ein Kühlschrank ist ein geschlossenes system. Seine Temperatur wird von einem Thermostat gemessen, der den Motor einschaltet, wenn die Temperatur über den gewünschten Wert steigt, und den Motor ausschaltet, wenn die Temperatur wieder den gewünschten Wert erreicht.
- Die Beleuchtung eines Raumes ist ein offenes System. Sobald das Licht eingeschaltet ist, bleibt es an (bis es ausgeschaltet ist), unabhängig davon, ob der Raum dunkel oder hell ist.
Unterschiede zwischen open-loop und closed-loop-Systeme
| S.,Nein. | Open-loop-System | Closed-loop-System |
| 1 | Die feedback-element ist nicht vorhanden. | Das Feedback-Element immer vorhanden. |
| 2 | Ein Fehler Detektor ist nicht vorhanden. | Ein Fehlerdetektor ist immer vorhanden. |
| 3 | Ein Open-Loop-System ist im Allgemeinen stabil. | Das Closed-Loop-System kann unter bestimmten Bedingungen instabil werden. |
| 4 | Sie können durch Nichtlinearitäten im System beeinflusst werden. | Sie können die Auswirkungen von Nichtlinearitäten im System anpassen., |
| 5 | Es ist leicht zu konstruieren. | Es hat komplizierte Konstruktion. |
| 6 | Es ist kostengünstig. | Es ist kostspielig. |
| 7 | Es hat eine kleine Bandbreite. | Es hat eine große Bandbreite. |
| 8 | Sie sind in der Regel ungenau. | Sie sind genau. |
| 9 | Es hat weniger Wartung. | Es hat mehr Wartung. |
| 10 | Es ist unzuverlässig. | Es ist zuverlässig., |
| 11 | Examples: Washing machine, fixed time traffic control system, room heater, etc | Examples: Servomotor control, generator output voltage control system, refrigerator, biological system, etc. |
Other Types of Control Systems
Linear and Non-linear
A linear system is one that obeys the principle of superposition., Das Prinzip der Überlagerung besagt, dass die Antwort, die durch die gleichzeitige Anwendung von zwei verschiedenen Zwangsfunktionen erzeugt wird, gleich der Summe der einzelnen Antworten ist.
Nichtlineare Systeme gehorchen nicht dem Prinzip der Überlagerung. Fast alle praktischen Systeme sind zum Teil nicht linear. Nichtlinearitäten werden aufgrund der Sättigungswirkung von Systemkomponenten, Reibungskräften, des Spiels zwischen Zahnradzügen, mechanischen Verbindungen, Nichtlinearitäten elektronischer Komponenten wie Leistungsverstärkern, Transistoren usw. eingeführt., verwendet., Die Steuerung linearer Systeme ist im Vergleich zur Steuerung nichtlinearer Systeme einfach.
Zeitinvariante und Zeitvariante
Das zeitinvariante Steuerungssystem ist eines, dessen Parameter nicht mit der Zeit variieren. Die Reaktion eines solchen Systems ist unabhängig vom Zeitpunkt der Eingabe. Beispielsweise sind Widerstand, Induktivität und Kapazität eines elektrischen Netzwerks zeitunabhängig.
Ein zeitvariierendes System ist eines, bei dem ein oder mehrere Parameter mit der Zeit variieren. Die Antwort hängt von der Zeit ab, zu der die Eingabe angewendet wird., Ein Raumfahrzeugsteuerungssystem, bei dem die Masse mit der Zeit abnimmt, da Kraftstoff, den es trägt, während des Fluges verbraucht wird, ist ein Beispiel für ein zeitvariierendes System.
Kontinuierliche Zeit und diskrete
In kontinuierlichen Steuerungssystemen sind alle Systemparameter eine Funktion der kontinuierlichen Zeit, t. Eine diskrete Zeitsteuerung beinhaltet eine oder mehrere Variablen, die nur in diskreten Zeitabständen bekannt sind.
Eine kontinuierliche Zeit oder kontinuierliche Daten ist eine, in der die Signale an verschiedenen Teilen des Systems kontinuierliche Funktionen der Zeit sind. Diese Signale sind kontinuierliche Zeitsignale., Wenn wir zum Beispiel die Drehzahlregelung eines DC-Motors betrachten, wissen wir, dass der Ausgang, dh die Drehung in Bezug auf Bogenmaß pro Sekunde, eine Funktion der Spannung und des Stroms ist, die ihm auf kontinuierlicher Zeitbasis als Eingang zur Verfügung gestellt werden. Ein solches System nimmt einen kontinuierlichen Zeiteingang auf und liefert einen kontinuierlichen Zeitausgang.
Single-Input-Single-Output (SISO) und Multi-Input–Multi-Output (MIMO)
Ein System mit einem Eingang und einem Ausgang wird als Single-Input–Single-Output-Steuerungssystem bezeichnet. Mit anderen Worten, es gibt nur einen Befehl und eine gesteuerte Ausgabe.,
Ein System mit mehreren Eingängen und mehreren Ausgängen wird als Steuerungssystem mit mehreren Eingängen und mehreren Ausgängen bezeichnet. Zum Beispiel Kesseltrommelpegelregelung, Roboterarmsteuerung usw. Der Roboterarm erfüllt mehrere Funktionen mit mehreren Eingängen. Diese vielfältigen Funktionen werden als Freiheitsgrad bezeichnet.
Lumpenparameter und verteilte Parameter
Steuerungssysteme, die durch gewöhnliche Differentialgleichungen beschrieben werden können, sind Lumpenparameter-Steuerungssysteme, während verteilte Parameter-Steuerungssysteme durch partielle Differentialgleichungen beschrieben werden., Die Parameter einer langen Übertragungsleitung, dh der Widerstand, die Induktivität und die Kapazität, sind entlang der Leitung verteilt, können jedoch an bestimmten Punkten als zusammengewürfelte Parameter betrachtet werden.
Deterministisch und stochastisch
Ein Steuersystem ist deterministisch, wenn die Antwort vorhersehbar und wiederholbar ist. Wenn nicht, ist das Steuersystem ein stochastisches Steuersystem, das zufällige variable Parameter beinhaltet.,
Statische und dynamische Systeme
Ein System wird als dynamisch oder zeitabhängig bezeichnet, wenn seine gegenwärtige Ausgabe von früheren Eingaben abhängt, wohingegen ein statisches System diejenige ist, deren aktuelle Ausgabe nur von der aktuellen abhängt Eingang.