
- Vad är en Servo?
- Hur kontrollerar jag en Servo?
- Hur kontrollerar jag en Servo från en Arduino?
- Hur kontrollerar jag en Servo från en Raspbery Pi?
- hur Driver jag en Servo?
- Hur skickar jag en Signal över ett långt avstånd?
- hur roterar jag en Servo en viss mängd (90°, 180°, kontinuerlig, etc)?
- Hur byter jag ut en Servoväxelsats?
- hur mäts Servohastigheten?
- hur mäts Servomomentet?
- Vad är” Riktning ” av en Servo hänvisar till?
- Vad är en Servo Spline?,
Vad är en Servo?
hur styr jag en Servo?
till skillnad från borstade likströmsmotorer kan servon inte köras genom att helt enkelt använda en spänning. Förutom tillförsel av matningsspänning (på den röda ledningen) för motorn att dra från, måste en specifik signal som kallas en PWM-Signal skickas på signalkabeln (vanligtvis gul eller vit). Denna signal kan komma från en mängd olika källor som servostyrenheter, RC-mottagare eller Arduinos.
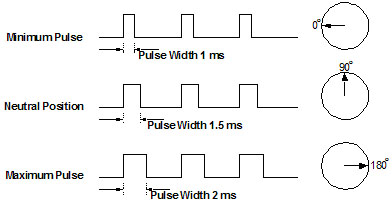
 servon styrs genom att skicka dem en puls med variabel bredd. Styrkabeln används för att skicka denna puls., Parametrarna för denna puls är att den har en minsta puls, en maximal puls och en repetitionshastighet. Med tanke på servoens rotationsbegränsningar definieras neutral som den position där servon har exakt samma mängd potentiell rotation i medurs riktning som den gör i moturs riktning. Det är viktigt att notera att olika servon kommer att ha olika begränsningar på deras rotation men de har alla en neutral position, och den positionen är alltid runt 1,5 millisekunder (ms).,
servon styrs genom att skicka dem en puls med variabel bredd. Styrkabeln används för att skicka denna puls., Parametrarna för denna puls är att den har en minsta puls, en maximal puls och en repetitionshastighet. Med tanke på servoens rotationsbegränsningar definieras neutral som den position där servon har exakt samma mängd potentiell rotation i medurs riktning som den gör i moturs riktning. Det är viktigt att notera att olika servon kommer att ha olika begränsningar på deras rotation men de har alla en neutral position, och den positionen är alltid runt 1,5 millisekunder (ms).,

vinkeln bestäms av varaktigheten av en puls som appliceras på styrtråden. Detta kallas pulsbreddsmodulering. Servon förväntar sig att se en puls varje 20 ms. pulsens längd bestämmer hur långt motorn vänder. En 1,5 ms-puls gör till exempel att motorn vrids till 90 graders läge (neutralt läge).
När dessa servon är befallda att flytta kommer de att flytta till positionen och hålla den positionen., Om en yttre kraft trycker mot servo medan servo håller en position, kommer servoen att motstå från att flytta ut ur den positionen. Den maximala kraft som servo kan utöva är servoens vridmomentklassificering. Servon kommer dock inte att hålla sin position för alltid; positionspulsen måste upprepas för att instruera servoen att stanna kvar i position.
När en puls skickas till en servo som är mindre än 1,5 ms roterar servon till en position och håller sin utgående axel ett antal grader moturs från den neutrala punkten. När pulsen är bredare än 1,5 ms uppträder motsatsen., Den minsta bredden och den maximala bredden av puls som kommer att befalla servo att vända sig till en giltig position är funktioner för varje servo. Olika märken, och till och med olika servon av samma märke, kommer att ha olika maximala och minimumvärden. I allmänhet kommer den minsta pulsen att vara ca 1 ms bred och den maximala pulsen blir 2 ms bred.
en annan parameter som varierar från servo till servo är svänghastigheten. Det här är den tid det tar från servo att byta från en position till en annan., Det värsta fallet vändtiden är när servo håller vid minsta rotation och det är befallt att gå till maximal rotation. Detta kan ta flera sekunder på mycket höga vridmoment servon.
syftet med denna information är att ge en översikt över hur servon fungerar och hur man kommunicerar med dem. Även om vi har vidtagit åtgärder för att försäkra kvaliteten på informationen här, ger ServoCity inga garantier om den information som presenteras. ServoCity kan inte hållas ansvarig eller ansvarig för användning eller missbruk av den tillhandahållna informationen., Om du har frågor om denna information vänligen e-post [email protected].
hur styr jag en Servo från en Arduino?
Hur kontrollerar jag en Servo från en Raspberry Pi?
medan Raspberry Pis kan mata ut en PWM-signal, kan de ofta inte behålla en ren signal på grund av bristen på en dedikerad timer. Om du kontrollerar servon från en Raspberry Pi rekommenderar vi starkt att du får en servohatt för din raspberry pi.
hur Driver jag en Servo?,
det bästa sättet att driva en servo är med ett batteri med en spänning inom spänningsområdet som anges på servo sidor SPECIFIKATIONER tabellen. Se till att använda ett hälsosamt batteri som kan leverera mer än tillräckligt med ström. Eftersom strömmen dras och inte skjuts, har mer ström tillgänglig än vad som behövs kommer inte att skada servo (det är som att ha mer gas än du behöver för att få någonstans i bilen). Kraften för servos motor levereras på den röda ledningen., Det kan vara användbart att skära den röda ledningen (eller använd en X-Acto för att dra kontakten från huset) så att du kan leverera ström separat från signalen. Detta skulle tillåta dig att driva din mottagare på ett annat batteri än din servo om de behöver olika spänningar. Det skulle också tillåta dig att driva din servo motor direkt från ett batteri medan signalen kommer från en Arduino eftersom Arduino stift inte kan hantera den typ av ström en servo behov (de i allmänhet max ut på 40mA).
Hur skickar jag en Signal över ett långt avstånd?,
Ibland när du skickar en signal över ett långt avstånd kan signalen försämras på grund av spänningsfall och elektromagnetisk störning (EMI). En servo signal booster kan lösa dessa problem och göra det enkelt att överföra signalen över ett stort avstånd av tråd.
hur roterar jag en Servo en viss mängd (90°, 180°, kontinuerlig, etc)?
 när det styrs med ett radiostyrningssystem erbjuder de flesta hobby servon 90° (45° antingen riktning) rotation direkt ur lådan., Detta kan ibland ökas om ditt radiosystem erbjuder slutpunktsjusteringar eller din servostyrenhet har en 180° jumper pin. Om du använder Hitec digital servon, du vill helt enkelt köpa handhållna programmerare för att öka rotationen. Om du har en Hitec eller Futaba analog servo som bara erbjuder 90 ° rotation, kan rotationsmängden ibland ökas till 180 ° genom att utföra en enkel modifiering.
när det styrs med ett radiostyrningssystem erbjuder de flesta hobby servon 90° (45° antingen riktning) rotation direkt ur lådan., Detta kan ibland ökas om ditt radiosystem erbjuder slutpunktsjusteringar eller din servostyrenhet har en 180° jumper pin. Om du använder Hitec digital servon, du vill helt enkelt köpa handhållna programmerare för att öka rotationen. Om du har en Hitec eller Futaba analog servo som bara erbjuder 90 ° rotation, kan rotationsmängden ibland ökas till 180 ° genom att utföra en enkel modifiering.
Obs: Du kan köpa Hitec servon från oss som är förmodifierade i vår egen tillverkningsanläggning på de enskilda Hitec servo sidor., Denna ändring ogiltigförklarar alla ServoCity och Hitec garantier.
Hur byter jag ut en Servoväxelsats?
hur mäts Servohastigheten?
hur mäts Servomomentet?
Vad är ”Riktning” av en Servo hänvisar till?
alla servon roterar medurs och moturs. Den riktning servo roterar allt beror på signalen servo tar emot. Inte alla servon matchar när det gäller rotationsriktning direkt ur lådan., Om du ansluter en Hitec servo till din radiokontrollmottagare eller servokontroll och du säger servon att vända åt höger (medurs), kommer den att flytta till höger. Om du sedan ansluter en Futaba servo i samma mottagare eller servostyrenhet och berätta för den att gå i samma riktning som Hitec servo gjorde, kommer den att flytta motsatt riktning (moturs). Detta är en enkel fix med de flesta radiostyrsystem eftersom de har en servo backande
Funktion på sändaren., Denna skillnad mellan tillverkare är anledningen till att varje servo kommer att ha en spec som ringer ut riktningen att servo kommer att röra sig med en ökande PWM-signal.
Vad är en Servo Spline?
den tandade utgångsaxeln hos en servo brukar kallas en servo spline. För en uppdelning av alla olika typer av servosplines på servon vi säljer, kolla in Servo Spline posten i vår ordlista.