grundtanken bakom en PID-styrenhet är att läsa en sensor, sedan beräkna den önskade ställdonsutgången genom att beräkna proportionella, integrerade och derivat svar och summera dessa tre komponenter för att beräkna utgången. Innan vi börjar definiera parametrarna för en PID-styrenhet ska vi se vad ett slutet loop-system är och några av terminologierna som är associerade med det.,
Closed Loop System
i ett typiskt styrsystem är processvariabeln den systemparameter som behöver styras, såsom temperatur (ºC), tryck (psi) eller flödeshastighet (liter/minut). En sensor används för att mäta processvariabeln och ge feedback till styrsystemet. Börvärdet är önskat eller kommandovärde för processvariabeln, till exempel 100 grader Celsius vid ett temperaturkontrollsystem., Vid varje given tidpunkt används skillnaden mellan processvariabeln och börvärdet av styrsystemalgoritmen (kompensator) för att bestämma önskad aktiveringsutgång för att driva systemet (växt). Till exempel, om den uppmätta temperaturprocessvariabeln är 100 ºC och den önskade temperaturbörvärdet är 120 ºC, kan manöverdonets utgång som anges av kontrollalgoritmen vara att driva en värmare. Att köra ett ställdon för att slå på en värmare gör att systemet blir varmare och resulterar i en ökning av temperaturprocessvariabeln., Detta kallas en sluten slinga styrsystem, eftersom processen för avläsning sensorer för att ge konstant återkoppling och beräkning av den önskade ställdonutgången upprepas kontinuerligt och vid en fast slinga hastighet som illustreras i Figur 1.
i många fall är ställdonets utgång inte den enda signalen som påverkar systemet. Till exempel, i en temperaturkammare kan det finnas en källa till kall luft som ibland blåser in i kammaren och stör temperaturen.En sådan term kallas störning., Vi försöker vanligtvis att utforma styrsystemet för att minimera effekten av störningar på processvariabeln.
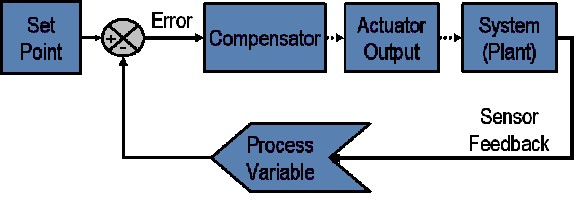
Figur 1: Blockdiagram för ett typiskt slutet loop-system.
definition av terminologier
styrdesignprocessen börjar med att definiera prestandakraven. Styrsystemets prestanda mäts ofta genom att använda en stegfunktion som börvärdet kommandovariabel, och sedan mäta svaret av processvariabeln. Vanligtvis kvantifieras svaret genom att mäta definierade vågformsegenskaper., Stigtid är den tid som systemet tar för att gå från 10% till 90% av steady-state, eller slutlig, värde. Procentöverskridande är det belopp som processvariabeln överskrider det slutliga värdet, uttryckt i procent av det slutliga värdet. Avvecklingstid är den tid som krävs för processvariabeln att lösa sig inom en viss procentandel (vanligen 5%) av det slutliga värdet. Steady-State fel är den slutliga skillnaden mellan processvariabeln och börvärdet. Observera att den exakta definitionen av dessa kvantiteter kommer att variera inom industri och akademi.,
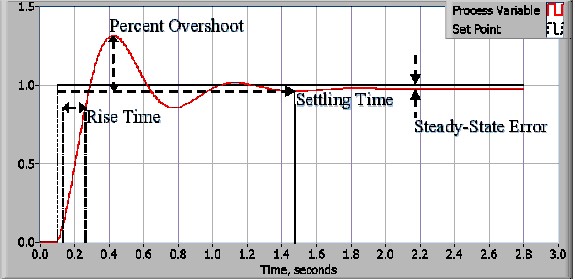
Figur 2: Svar på ett typiskt PID-slutet loop-system.
efter att ha använt en eller alla dessa kvantiteter för att definiera prestandakraven för ett kontrollsystem är det lämpligt att definiera de värsta fall där kontrollsystemet förväntas uppfylla dessa konstruktionskrav. Ofta är det en störning i systemet som påverkar processvariabeln eller mätningen av processvariabeln. Det är viktigt att utforma ett styrsystem som fungerar tillfredsställande under värsta fall., Måttet på hur väl kontrollsystemet kan övervinna effekterna av störningar kallas störningsavstötningen av kontrollsystemet.
i vissa fall kan systemets svar på en viss kontrollutgång ändras över tiden eller i förhållande till en viss variabel. Ett icke-linjärt system är ett system där kontrollparametrarna som ger ett önskat svar vid en driftspunkt kanske inte ger ett tillfredsställande svar vid en annan driftspunkt., Till exempel, en kammare delvis fylld med vätska kommer att uppvisa en mycket snabbare svar på värmare utgång när nästan tom än det kommer när nästan full av vätska. Måttet på hur väl kontrollsystemet kommer att tolerera störningar och ickelinjäriteter kallas kontrollsystemets robusthet.
vissa system uppvisar ett oönskat beteende som kallas deadtime. Deadtime är en fördröjning mellan när en processvariabel ändras, och när den förändringen kan observeras., Till exempel, om en temperatursensor placeras långt bort från en kallvattenvätska inloppsventil, det kommer inte att mäta en temperaturförändring omedelbart om ventilen öppnas eller stängs. Dödtid kan också orsakas av ett system eller utgångsställdon som är långsam att svara på kommandot, till exempel en ventil som är långsam att öppna eller stänga. En vanlig källa till dödtid i kemiska växter är fördröjningen orsakad av flödet av vätska genom rör.
Loop cykeln är också en viktig parameter i ett slutet kretslopp. Tidsintervallet mellan samtal till en kontrollalgoritm är slingcykeltiden., System som förändras snabbt eller har komplext beteende kräver snabbare kontroll loop priser.
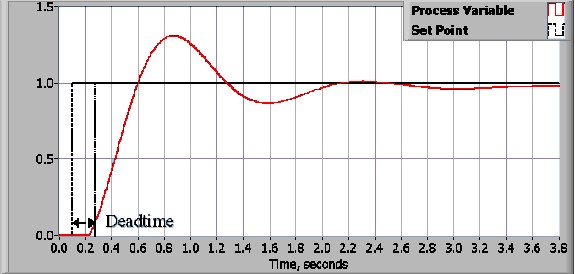
Figur 3: Svar på ett slutet loop-system med dödtid.
när prestandakraven har angetts är det dags att undersöka systemet och välja ett lämpligt kontrollschema. I de allra flesta applikationer kommer en PID-kontroll att ge de nödvändiga resultaten