Innehållsförteckning
styrsystem
styrsystem spelar en viktig roll i vårt dagliga liv. Begreppet ett automatiskt styrsystem är grundläggande och väl blandat i alla aspekter av vårt liv. Det automatiska styrsystemet spelar en viktig roll i utvecklingen och förbättringen av tekniska färdigheter.,
ett system är en kombination av enheter och komponenter som är sammankopplade av någon form av regelbundna interaktioner för att agera tillsammans och utföra ett visst mål. Systemet kan vara fysiskt, biologiskt, ekonomiskt och liknande.
termen kontroll innebär att reglera, att styra eller att kommandot. Således kan ett styrsystem definieras som en kombination av enheter och komponenter som är anslutna eller relaterade för att styra, styra eller reglera sig själv eller ett annat system.,
styrsystem används i många applikationer, till exempel kontroll av temperatur, vätskenivå, position, hastighet, flöde, tryck, acceleration etc.
funktioner i ett styrsystem
det viktigaste inslaget i ett styrsystem är att det ska finnas ett tydligt matematiskt förhållande mellan inmatning och utmatning av systemet. När förhållandet mellan ingång och utgång av systemet kan representeras av en linjär proportionalitet kallas systemet ett linjärt styrsystem., Igen när förhållandet mellan ingång och utgång inte kan representeras av en enda linjär proportionalitet, snarare är ingång och utgång relaterad av något icke-linjärt förhållande, kallas systemet ett icke-linjärt styrsystem.
krav på ett bra styrsystem
noggrannhet: noggrannhet är instrumentets mättolerans och definierar gränserna för de fel som uppstår när instrumentet används under normala driftsförhållanden. Noggrannhet kan förbättras genom att använda återkopplingselement., För att öka noggrannheten hos någon kontrollsystem feldetektor bör vara närvarande i styrsystemet.
känslighet: parametrarna för ett styrsystem förändras alltid med förändringen i omgivande förhållanden, interna störningar eller andra parametrar. Denna förändring kan uttryckas i form av känslighet. Alla kontrollsystem bör vara okänsliga för sådana parametrar men endast känsliga för insignaler.
brus: en oönskad insignal kallas brus. Ett bra styrsystem bör kunna minska bullereffekten för bättre prestanda.,
stabilitet: det är en viktig egenskap hos styrsystemet. För den avgränsade insignalen måste utgången begränsas och om ingången är noll måste utgången vara noll då ett sådant styrsystem sägs vara ett stabilt system.
bandbredd: ett frekvensområde bestämmer styrsystemets bandbredd. Bandbredden ska vara så stor som möjligt för frekvensrespons för det goda styrsystemet.
hastighet: det är den tid som styrsystemet tar för att uppnå sin stabila utgång. Ett bra styrsystem har hög hastighet., Den övergående perioden för ett sådant system är mycket liten.
Oscillation: ett litet antal oscillationer eller konstant oscillation av produktionen tenderar att indikera att systemet är stabilt.
grundläggande komponenter i ett styrsystem
de grundläggande komponenterna i ett styrsystem kan representeras av:
- referensinmatningselement som orsakar kommandosignalen;
- återkopplingselement som producerar återkopplingssignalen;
- feldetektor;
- styrenhet;
- styrt system; och
- utsignalen, det vill säga den kontrollerade utgången.,
dessa komponenter visas i form av ett systemblocksdiagram enligt figuren nedan och beskrivs enligt följande.
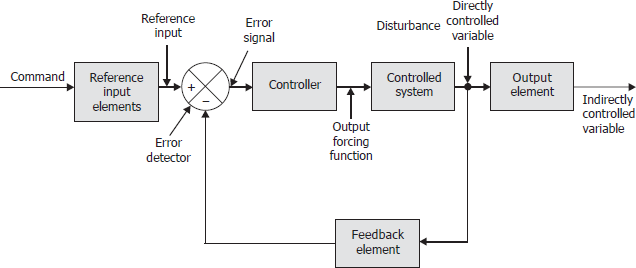
- Referensinmatningselement: dessa utgör positionen för återkopplingskontrollsystemet som fastställer förhållandet mellan kommandot och viss referensinmatning.,
- Command: Command är en avsiktligt införd signal etablerad på något sätt, extern till och oberoende av återkopplingskontrollsystemet som behandlas.
- Referensinmatning: det är en signal som fastställts som en standard för jämförelse för ett återkopplingskontrollsystem på grund av dess förhållande till kommandot.
- Feldetektor: det är ett element där en systemvariabel (återkopplingssignal) subtraheras från en annan variabel (Referenssignal) för att erhålla den tredje variabeln (felsignal). Det kallas också en komparator.,
- Återkopplingselement: återkopplingssignal är en funktion av den styrda utgången som jämförs med referenssignalen för att erhålla aktiveringssignalen.
- felsignal: det är en algebraisk summa av referensinmatningen och den primära återkopplingen.
- Controller: regulatorn är ett element som krävs för att generera lämplig styrsignal.
- Utmatningsstyrningsfunktion: det är villkoret som varieras som en funktion av aktiveringssignalen för att ändra värdet på den kontrollerade variabeln.,
- styrt System: det är en kropp, process eller maskin som ett visst tillstånd ska styras, till exempel en rymdfarkost, reaktor, panna, CNC-maskin etc.
- kontrollerad variabel: Det är en variabel som mäts och kontrolleras direkt. Störningen är annan ingång än ett kommando som tenderar att påverka värdet på den kontrollerade variabeln.
- Utgångselement: det här är de element som fastställer förhållandet mellan den direkt kontrollerade variabeln och indirekt kontrollerade variabeln.,
klassificering av styrsystem
Open-Loop styrsystem
ett styrsystem som inte kan anpassa sig till ändringarna kallas ett open-loop styrsystem. I allmänhet är manuella styrsystem öppna loop-system. Blockdiagrammet för open-loop-styrsystemet visas i figuren nedan.,

här är R(t) ingångssignalen, u(t) är styrsignalen / aktiveringssignalen och C(t) är utgångssignalen.
i det här systemet förblir utmatningen oförändrad för konstant inmatning. Vid eventuell diskrepans bör inmatningen ändras manuellt av en operatör., Ett system med öppen slinga är lämpat när det finns tolerans för fluktuationer i systemet och när systemparameterns variation kan hanteras oberoende av miljöförhållandena.
fördelar med Open-loop System
- dessa system är enkla i konstruktion och design.
- Open-loop-systemen är ekonomiska.
- dessa system är lätta ur underhållssynpunkt.
- vanligtvis är dessa system inte mycket oroliga med stabilitetsproblem.
- dessa system är praktiska att använda när utmatningen är svår att mäta.,
nackdelar
- dessa system är inte korrekta och tillförlitliga eftersom deras noggrannhet är beroende av kalibreringens noggrannhet.
- i dessa system erhålls felaktiga resultat med parametervariationer, dvs interna störningar.
- omkalibrering av styrenheten krävs från tid till annan för att upprätthålla kvalitet och noggrannhet.
Closed-Loop Control System
alla system som kan svara på ändringarna och göra korrigeringar i sig är känt som ett closed-loop control system., Den enda skillnaden mellan open-loop och closed-loop-system är återkopplingsåtgärden. Blockdiagrammet för ett slutet slinga styrsystem visas i figuren nedan.
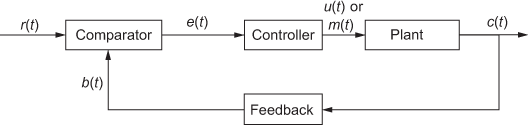
här matas maskinens utgång tillbaka till en komparator (feldetektor). Utgångssignalen jämförs med referensinmatningen r (t) och felsignalen e(t) skickas till regulatorn., Baserat på felet justerar regulatorn luftkonditioneringens ingång . Denna process fortsätter tills felet blir ogiltigt. Både manuella och automatiska kontroller kan genomföras i ett slutet kretslopp. Den totala vinsten i ett system reduceras på grund av närvaron av feedback. För att kompensera för minskningen av vinsten, om en förstärkare införs för att öka förstärkningen av ett system, kan systemet ibland bli instabilt.
fördelar med close-loop system
- i dessa system är noggrannheten mycket hög på grund av korrigeringen av eventuella uppkomna fel.,
- eftersom dessa system känner av miljöförändringar såväl som interna störningar ändras felet.
- Det finns en minskad effekt av icke-linjäritet i dessa system.
- dessa system har hög bandbredd, dvs hög arbetsfrekvens zon.
- Det finns faciliteter för automatisering i dessa system.
nackdelar
- systemen är komplicerade i design.
- de nära loop-systemen är dyrare.
- dessa system kan vara instabila.,
några exempel på system för öppen slinga och sluten slinga är följande:
- trafikljussystem varierar i drift. Vissa system är slutna och vissa är öppna. I open-loop-typen finns en tidsmekanism som är inställd för att växla lamporna med jämna mellanrum, oavsett trafikvolymen. I den slutna slingtypen övervakas emellertid mängden trafik som passerar genom korsningen (elektroniskt eller på annat sätt), och varaktigheten av de ”röda” och ”gröna” förhållandena justeras för varje del av korsningen i enlighet därmed.,
- ett exempel på ett open-loop-system är en biltvättmaskin där alla bilar får samma mängd tvätt oavsett hur smutsiga de är. Här är produktionen renheten hos bilarna, vilket motsvarar en given inställning av maskinen (mängd vatten och tvätttid). En människa som tvättar bilar ser dock automatiskt till att de smutsigare bilarna får mer uppmärksamhet än andra. Biltvätt av en ansvarig människa är därför ett kontrollsystem för sluten slinga. En vanlig tvättmaskin är ett open-loop-system.,
- ett kylskåp är ett slutet loop-system. Dess temperatur mäts med en termostat som slår på motorn när temperaturen stiger över önskat värde och stänger av motorn när temperaturen igen når önskat värde.
- belysningen av ett rum är ett open-loop-system. När lampan är påslagen kommer den att vara på (tills den är avstängd) oavsett om rummet är mörkt eller ljust.
skillnader mellan open-loop och closed-loop system
| S.,Nej. | Open-loop System | Closed-loop System |
| 1 | återkopplingselementet är frånvarande. | återkopplingselementet finns alltid. |
| 2 | en feldetektor finns inte. | en feldetektor är alltid närvarande. |
| 3 | ett open-loop-system är i allmänhet stabilt. | det slutna systemet kan bli instabilt under vissa förhållanden. |
| 4 | de kan påverkas av icke-linjäriteter i systemet. | de kan justera effekterna av icke-linjäriteter som finns i systemet., |
| 5 | det är lätt att konstruera. | det har komplicerad konstruktion. |
| 6 | det är ekonomiskt. | det är dyrt. |
| 7 | den har en liten bandbredd. | den har en stor bandbredd. |
| 8 | de är i allmänhet felaktiga. | de är korrekta. |
| 9 | det har mindre underhåll. | det har mer underhåll. |
| 10 | det är opålitligt. | det är tillförlitligt., |
| 11 | Examples: Washing machine, fixed time traffic control system, room heater, etc | Examples: Servomotor control, generator output voltage control system, refrigerator, biological system, etc. |
Other Types of Control Systems
Linear and Non-linear
A linear system is one that obeys the principle of superposition., Principen om överlagring anger att svaret som produceras genom samtidig tillämpning av två olika tvingningsfunktioner är lika med summan av enskilda svar.
Icke-linjära system följer inte principen om överlagring. Nästan alla praktiska system är i viss utsträckning icke-linjära. Icke-linjäriteter införs på grund av mättnad effekt av systemkomponenter, friktionskrafter, spela mellan växeltåg, mekaniska kopplingar, icke-linjäriteter av elektroniska komponenter som effektförstärkare, transistorer, etc., används., Kontroll av linjära system är lätt jämfört med kontroll av icke-linjära system.
time-invariant och time-variable
time-invariant control system är en vars parametrar inte varierar med tiden. Svaret från ett sådant system är oberoende av den tidpunkt då inmatningen tillämpas. Till exempel är motstånd, induktans och kapacitans hos ett elnät oberoende av tid.
ett tidsvarierande system är ett system där en eller flera parametrar varierar med tiden. Svaret beror på den tidpunkt då inmatningen tillämpas., Ett kontrollsystem för rymdfordon där massan minskar med tiden, eftersom bränsle som det transporterar förbrukas under flygning, är ett exempel på ett tidsvarierande system.
kontinuerlig tid och diskret
i kontinuerliga styrsystem är alla systemparametrar en funktion av kontinuerlig tid, t. en diskret tidskontroll innefattar en eller flera variabler som endast är kända vid diskreta tidpunkter.
en kontinuerlig tid eller kontinuerlig data är en där signalerna vid olika delar av systemet är kontinuerliga funktioner av tiden. Dessa signaler är kontinuerliga tidssignaler., Till exempel, när vi betraktar varvtalsreglering av en D.C. motor, vet vi att utgången, det vill säga rotationen när det gäller radianer per sekund är en funktion av spänning och ström som tillhandahålls som ingång till den kontinuerligt. Ett sådant system tar en kontinuerlig inmatning och ger en kontinuerlig utmatning.
Enda Input Single Output (SISO) och Multi-Input–Multi-Output (MIMO)
Ett system med en ingång och en utgång som kallas en enda input single output control system. Med andra ord finns det bara ett kommando och en kontrollerad utgång.,
ett system med flera ingångar och flera utgångar kallas ett multi-input–Multi-output styrsystem. Till exempel, panna trumma nivåkontroll, robot arm kontroll, etc. Robotarmen utför flera funktioner med flera ingångar. Dessa flera funktioner kallas graden av frihet.
Lumped Parameter och Distributed Parameter
styrsystem som kan beskrivas med vanliga differentialekvationer är klumpade parameterkontrollsystem medan distribuerade parameterkontrollsystem beskrivs med partiella differentialekvationer., Parametrarna för en lång överföringsledning, det vill säga motståndet, induktansen och kapacitansen, fördelas längs linjen men de kan betraktas som klumpade parametrar vid vissa punkter.
deterministisk och stokastisk
ett kontrollsystem är deterministiskt om svaret är förutsägbart och repeterbart. Om inte, är styrsystemet ett stokastiskt styrsystem som involverar slumpmässiga variabla parametrar.,
statiska och dynamiska system
ett system kallas dynamiskt eller tidsberoende om dess nuvarande utgång beror på tidigare ingång, medan ett statiskt system är det vars nuvarande utgång endast beror på aktuell ingång.