ideea de bază din spatele unui controler PID este de a citi un senzor, apoi calcula ieșirea de acționare dorită prin calcularea răspunsurilor proporționale, integrale și derivate și însumarea acestor trei componente pentru a calcula ieșirea. Înainte de a începe să definim parametrii unui controler PID, vom vedea ce este un sistem cu buclă închisă și unele dintre terminologiile asociate cu acesta.,
sistem cu buclă închisă
într-un sistem tipic de control, variabila de proces este parametrul sistemului care trebuie controlat, cum ar fi temperatura (ºC), presiunea (psi) sau debitul (litri/minut). Un senzor este utilizat pentru a măsura variabila de proces și pentru a oferi feedback sistemului de control. Punctul setat este valoarea dorită sau de comandă pentru variabila de proces, cum ar fi 100 de grade Celsius în cazul unui sistem de control al temperaturii., În orice moment, diferența dintre variabila de proces și punctul setat este utilizată de algoritmul sistemului de control (compensator), pentru a determina ieșirea de acționare dorită pentru a conduce sistemul (instalația). De exemplu, dacă variabila procesului de temperatură măsurată este de 100 ºC și punctul de setare a temperaturii dorit este de 120 ºC, atunci ieșirea actuatorului specificată de algoritmul de control ar putea fi de a conduce un încălzitor. Conducerea unui actuator pentru a porni un încălzitor determină încălzirea sistemului și are ca rezultat o creștere a variabilei procesului de temperatură., Acesta se numește sistem de control în buclă închisă, deoarece procesul de citire a senzorilor pentru a oferi feedback constant și calcularea ieșirii dorite a actuatorului se repetă continuu și la o rată fixă a buclei, așa cum este ilustrat în Figura 1.
în multe cazuri, ieșirea actuatorului nu este singurul semnal care are un efect asupra sistemului. De exemplu, într-o cameră de temperatură ar putea exista o sursă de aer rece care uneori suflă în cameră și perturbă temperatura.Un astfel de termen este denumit perturbare., De obicei, încercăm să proiectăm sistemul de control pentru a minimiza efectul perturbațiilor asupra variabilei de proces.
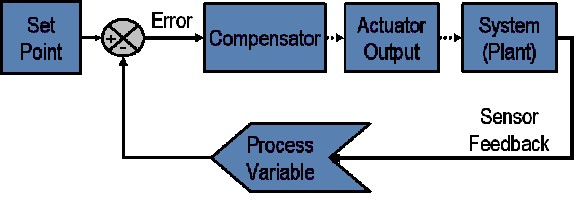
Figura 1: Diagrama bloc a unui sistem tipic cu buclă închisă.
definirea Terminlogiilor
procesul de proiectare a controlului începe prin definirea cerințelor de performanță. Performanța sistemului de Control este adesea măsurată prin aplicarea unei funcții pas ca variabilă de comandă punct de setare și apoi măsurarea răspunsului variabilei de proces. În mod obișnuit, răspunsul este cuantificat prin măsurarea caracteristicilor formei de undă definite., Timpul de creștere este timpul necesar sistemului pentru a trece de la 10% la 90% din valoarea la starea de echilibru sau finală. Procentul de depășire este suma pe care variabila de proces o depășește valoarea finală, exprimată ca procent din valoarea finală. Timpul de decontare este timpul necesar pentru ca variabila de proces să se stabilească într-un anumit procent (de obicei 5%) din valoarea finală. Eroarea la starea de echilibru este diferența finală dintre variabila de proces și punctul de setare. Rețineți că definiția exactă a acestor cantități va varia în industrie și în mediul academic.,
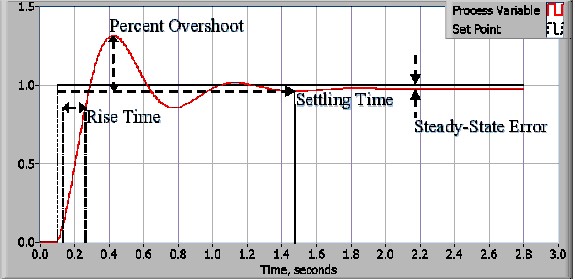
Figura 2: răspunsul unui sistem tipic PID cu buclă închisă.
după utilizarea uneia sau a tuturor acestor cantități pentru a defini cerințele de performanță pentru un sistem de control, este util să se definească condițiile cele mai nefavorabile în care sistemul de control va fi de așteptat să îndeplinească aceste cerințe de proiectare. De multe ori, există o perturbare a sistemului care afectează variabila de proces sau măsurarea variabilei de proces. Este important să se proiecteze un sistem de control care să funcționeze în mod satisfăcător în cele mai nefavorabile condiții., Măsura în care sistemul de control este capabil să depășească efectele perturbațiilor este denumită respingerea perturbării sistemului de control.
în unele cazuri, răspunsul sistemului la o ieșire de control dată se poate schimba în timp sau în raport cu unele variabile. Un sistem neliniar este un sistem în care parametrii de control care produc un răspuns dorit la un punct de operare ar putea să nu producă un răspuns satisfăcător la un alt punct de operare., De exemplu, o cameră parțial umplută cu lichid va prezenta un răspuns mult mai rapid la ieșirea încălzitorului atunci când este aproape goală decât atunci când este aproape plină de lichid. Măsura cât de bine sistemul de control va tolera perturbațiile și neliniaritățile este denumită robustețea sistemului de control.
unele sisteme prezintă un comportament nedorit numit deadtime. Deadtime este o întârziere între atunci când se schimbă o variabilă de proces, și atunci când această schimbare poate fi observată., De exemplu, dacă un senzor de temperatură este plasat departe de o supapă de admisie a fluidului de apă rece, acesta nu va măsura imediat o schimbare a temperaturii dacă supapa este deschisă sau închisă. Timpul mort poate fi, de asemenea, cauzat de un sistem sau de un actuator de ieșire care răspunde lent la comanda de control, de exemplu, o supapă care se deschide sau se închide lent. O sursă comună de timp mort în instalațiile chimice este întârzierea cauzată de curgerea fluidului prin conducte.
ciclul de buclă este, de asemenea, un parametru important al unui sistem cu buclă închisă. Intervalul de timp dintre apelurile către un algoritm de control este timpul ciclului de buclă., Sistemele care se schimbă rapid sau au un comportament complex necesită rate mai rapide ale buclelor de control.
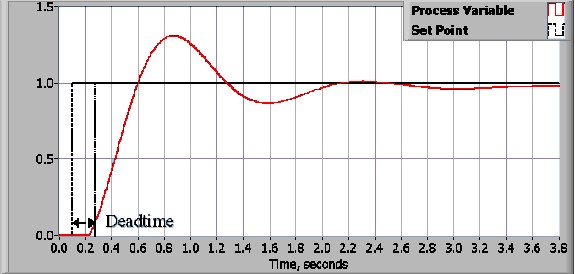
Figura 3: Răspunsul unui sistem de buclă închisă cu deadtime. odată ce cerințele de performanță au fost specificate, este timpul să examinați sistemul și să selectați o schemă de control adecvată. În marea majoritate a aplicațiilor, un control PID va oferi rezultatele necesare