cuprins
sistemul de Control
sistemele de Control joacă un rol vital în viața noastră de zi cu zi. Noțiunea de sistem de control automat este de bază și bine amestecată în fiecare aspect al vieții noastre. Sistemul de control automat joacă un rol important în avansarea și îmbunătățirea abilităților de inginerie.,un sistem este o combinație de dispozitive și componente conectate împreună printr-o formă de interacțiuni regulate pentru a acționa împreună și a îndeplini un anumit obiectiv. Sistemul poate fi fizic, biologic, economic și altele asemenea.
termenul control înseamnă a reglementa, a direcționa sau a comanda. Astfel, un sistem de control poate fi definit ca o combinație de dispozitive și componente conectate sau conexe astfel încât să comande, să direcționeze sau să reglementeze el însuși sau un alt sistem.,sistemele de Control sunt utilizate în multe aplicații, de exemplu, controlul temperaturii, nivelului lichidului, poziției, vitezei, debitului, presiunii, accelerației etc.caracteristica principală a unui sistem de control este că ar trebui să existe o relație matematică clară între intrarea și ieșirea sistemului. Când relația dintre intrare și ieșire a sistemului poate fi reprezentată de o proporționalitate liniară, sistemul se numește sistem de control liniar., Din nou, atunci când relația dintre intrare și ieșire nu poate fi reprezentată de o singură proporționalitate liniară, mai degrabă intrarea și ieșirea sunt legate de o relație neliniară, sistemul este denumit un sistem de control neliniar.
cerințe ale unui sistem de Control bun
precizie: precizia este toleranța de măsurare a instrumentului și definește limitele erorilor făcute atunci când instrumentul este utilizat în condiții normale de funcționare. Precizia poate fi îmbunătățită prin utilizarea elementelor de feedback., Pentru a crește precizia oricărui detector de erori de sistem de control ar trebui să fie prezent în sistemul de control.
sensibilitate: parametrii unui sistem de control se schimbă întotdeauna odată cu schimbarea condițiilor înconjurătoare, a perturbațiilor interne sau a oricăror alți parametri. Această schimbare poate fi exprimată în termeni de sensibilitate. Orice sistem de control ar trebui să fie insensibil la astfel de parametri, dar sensibil doar la semnalele de intrare.zgomot: un semnal de intrare nedorit este cunoscut sub numele de zgomot. Un sistem de control bun ar trebui să poată reduce efectul de zgomot pentru o performanță mai bună.,stabilitate: este o caracteristică importantă a sistemului de control. Pentru semnalul de intrare delimitat, ieșirea trebuie să fie delimitată și dacă intrarea este zero, atunci ieșirea trebuie să fie zero, atunci se spune că un astfel de sistem de control este un sistem stabil.
lățime de bandă: un interval de frecvență de operare decide lățimea de bandă a sistemului de control. Lățimea de bandă ar trebui să fie cât mai mare posibil pentru răspunsul în frecvență al sistemului de control bun.
viteză: este timpul necesar de către sistemul de control pentru a obține o ieșire stabilă. Un sistem bun de control are viteză mare., Perioada tranzitorie pentru un astfel de sistem este foarte mică.
oscilație: un număr mic de oscilație sau oscilație constantă de ieșire tinde să indice sistemul să fie stabil.
Componente de Bază ale unui Sistem de Control
componentele de bază ale unui sistem de control poate fi reprezentat prin:
- de referință element de intrare care determină semnalul de comandă;
- feedback element care produce semnalul de feedback;
- detector de eroare;
- controller;
- sistem controlat; și
- semnalul de ieșire, care este, de ieșire controlat.,aceste componente sunt prezentate sub forma unei diagrame bloc de sistem ca în figura de mai jos și sunt descrise după cum urmează.
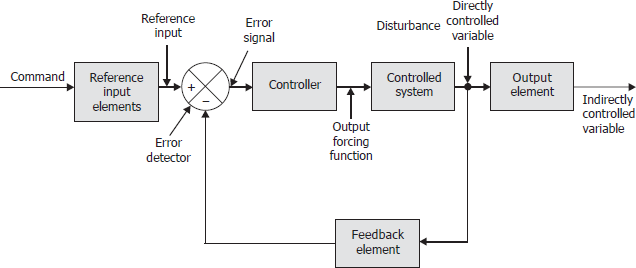
Componente de Bază ale unui Sistem de Control - de Referință Elemente de Intrare: Acestea constituie poziția de feedback-ul de sistem de control care stabilește relația între comandă și anumite intrare de referință.,
- comandă: Comanda este un semnal introdus în mod deliberat stabilit prin anumite mijloace, extern și independent de sistemul de control al feedback-ului în cauză.
- intrare de referință: este un semnal stabilit ca standard de comparație pentru un sistem de control al feedback-ului în virtutea relației sale cu comanda.
- detector de erori: este un element în care o variabilă de sistem (semnal de feedback) este scăzută dintr-o altă variabilă (semnal de referință) pentru a obține a treia variabilă (semnal de eroare). Se mai numește și comparator.,
- element de Feedback: semnalul de Feedback este o funcție a ieșirii controlate, care este comparată cu semnalul de referință pentru a obține semnalul de acționare.
- semnal de eroare: este o sumă algebrică a intrării de referință și a feedback-ului primar.
- controler: controlerul este un element care este necesar pentru a genera semnalul de control adecvat.
- funcția de forțare a ieșirii: este condiția care este variată ca funcție a semnalului de acționare, astfel încât să se modifice valoarea variabilei controlate.,
- sistem controlat: este un corp, proces sau mașină a cărui condiție specială trebuie controlată, de exemplu, o navă spațială, un reactor, un cazan, o mașină CNC etc.
- variabilă controlată: este o variabilă care este direct măsurată și controlată. Perturbarea este o altă intrare decât o comandă care tinde să afecteze valoarea variabilei controlate.
- elemente de ieșire: acestea sunt elementele care stabilesc relația dintre variabila controlată direct și variabila controlată indirect.,
Clasificarea sistemului de Control
sistem de control cu buclă deschisă
un sistem de control care nu se poate ajusta la modificări se numește sistem de control cu buclă deschisă. În general, sistemele de control manual sunt sisteme cu buclă deschisă. Diagrama bloc a sistemului de control cu buclă deschisă este prezentată în figura de mai jos.,

schema Bloc a unui open-loop control system Aici, r(t) este semnalul de intrare, u(t) este semnalul de comandă/de acționare semnalul și c(t) este semnalul de ieșire.
în acest sistem, ieșirea rămâne neschimbată pentru intrare constantă. În caz de discrepanță, intrarea trebuie modificată manual de către un operator., Un sistem de control cu buclă deschisă este potrivit atunci când există toleranță pentru fluctuație în sistem și când variația parametrilor sistemului poate fi gestionată indiferent de condițiile de mediu.avantajele sistemului Open-loop
- aceste sisteme sunt simple în construcție și proiectare.
- sistemele cu buclă deschisă sunt economice.
- aceste sisteme sunt ușor din punct de vedere al întreținerii.
- De obicei, aceste sisteme nu sunt foarte tulburate de probleme de stabilitate.
- aceste sisteme sunt convenabile de utilizat atunci când ieșirea este dificil de măsurat.,
dezavantaje
- aceste sisteme nu sunt exacte și fiabile, deoarece precizia lor depinde de precizia calibrării.
- în aceste sisteme, se obțin rezultate inexacte cu variații ale parametrilor, adică tulburări interne.
- recalibrarea controlerului este necesară din când în când pentru menținerea calității și preciziei.
sistem de control în buclă închisă
orice sistem care poate răspunde la modificări și poate face corecții de la sine este cunoscut ca un sistem de control în buclă închisă., Singura diferență între sistemele cu buclă deschisă și cu buclă închisă este acțiunea de feedback. Diagrama bloc a unui sistem de control în buclă închisă este prezentată în figura de mai jos.
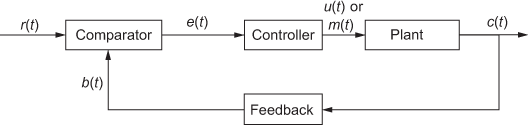
schema Bloc de control în buclă închisă a sistemului Aici, la ieșire din aparatul este alimentat înapoi la un comparator (detector de eroare). Semnalul de ieșire este comparat cu intrarea de Referință r (t), iar semnalul de eroare e(t) este trimis controlerului., Pe baza erorii, controlerul reglează intrarea aparatului de aer condiționat . Acest proces este continuat până când eroarea este anulată. Atât comenzile manuale, cât și cele automate pot fi implementate într-un sistem cu buclă închisă. Câștigul general al unui sistem este redus datorită prezenței feedback-ului. Pentru a compensa reducerea câștigului, dacă este introdus un amplificator pentru a crește câștigul unui sistem, Sistemul poate deveni uneori instabil.avantajele sistemului close-loop
- În aceste sisteme, precizia este foarte mare datorită corectării oricărei erori apărute., deoarece aceste sisteme simt schimbări de mediu, precum și tulburări interne, eroarea este modificată.
- există un efect redus al neliniarității în aceste sisteme.
- aceste sisteme au o lățime de bandă mare, adică o zonă de frecvență ridicată de operare.
- există facilități de automatizare în aceste sisteme.
dezavantaje
- sistemele sunt complicate în proiectare.
- sistemele close-loop sunt mai costisitoare.
- aceste sisteme pot fi instabile.,
câteva exemple de sisteme de control în buclă deschisă și în buclă închisă sunt următoarele:
- sistemele de semaforizare variază în funcționare. Unele sisteme sunt în buclă închisă, iar unele sunt în buclă deschisă. În tipul de buclă deschisă, există un mecanism de sincronizare care este setat pentru a comuta luminile la intervale regulate, indiferent de volumul traficului. Cu toate acestea, în tipul cu buclă închisă, cantitatea de trafic care trece prin intersecții este monitorizată (electronic sau altfel), iar durata condițiilor „roșu” și „verde” este ajustată corespunzător pentru fiecare parte a joncțiunii.,
- un exemplu de acțiune a unui sistem cu buclă deschisă este o mașină de spălat auto în care toate mașinile primesc aceeași cantitate de spălare, indiferent de cât de murdare sunt. Aici, ieșirea este curățenia mașinilor, ceea ce corespunde unei setări date a mașinii (cantitatea de apă și timpul de spălare). O ființă umană, însă, care spală mașini, se asigură automat că mașinile mai murdare primesc mai multă atenție decât altele. Spălarea mașinilor de către o ființă umană responsabilă este, prin urmare, un sistem de control în buclă închisă. O mașină de spălat obișnuită este un sistem cu buclă deschisă.,
- un frigider este un sistem cu buclă închisă. Temperatura sa este măsurată printr-un termostat care pornește motorul atunci când temperatura crește peste valoarea dorită și oprește motorul atunci când temperatura atinge din nou valoarea dorită.
- iluminarea unei camere este un sistem cu buclă deschisă. Odată ce lumina este aprinsă, aceasta va rămâne aprinsă (până când este oprită), indiferent dacă camera este întunecată sau luminoasă.
Diferențe între buclă deschisă și în buclă închisă sisteme
S.,Nu. sistem cu buclă deschisă sistem cu buclă închisă 1 elementul de feedback este absent. elementul de feedback întotdeauna prezent. 2 un detector de erori nu este prezent. un detector de erori este întotdeauna prezent. 3 un sistem cu buclă deschisă este în general stabil. sistemul cu buclă închisă poate deveni
instabil în anumite condiții.4 ele pot fi afectate de non-linearități în sistem. ele pot ajusta efectele neliniarităților prezente în sistem., 5 este ușor de construit. are o construcție complicată. 6 este economic. este costisitor. 7 are o lățime de bandă mică. are o lățime de bandă mare. 8 ele sunt, în general, inexacte. acestea sunt corecte. 9 are mai puțină întreținere. are mai multă întreținere. 10 este nesigur. este de încredere., 11 Examples: Washing machine, fixed time traffic control system, room heater, etc Examples: Servomotor control, generator output voltage control system, refrigerator, biological system, etc. Other Types of Control Systems
Linear and Non-linear
A linear system is one that obeys the principle of superposition., Principiul suprapunerii afirmă că răspunsul produs prin aplicarea simultană a două funcții de forțare diferite este egal cu suma răspunsurilor individuale.sistemele neliniare nu respectă principiul suprapunerii. Aproape toate sistemele practice sunt neliniare într-o oarecare măsură. Non-linearities sunt introduse datorită saturării efect de componente de sistem, forțe de frecare, juca între echipamentul de trenuri, legăturile mecanice, non-linearities de componente electronice ca amplificatoare de putere, tranzistori, etc., folosit., Controlul sistemelor liniare este ușor în comparație cu controlul sistemelor neliniare.
sistem de control invariant în timp și variabil în timp
sistemul de control invariant în timp este unul ai cărui parametri nu variază în funcție de timp. Răspunsul unui astfel de sistem este independent de momentul în care se aplică intrarea. De exemplu, rezistența, inductanța și capacitatea unei rețele electrice sunt independente de timp.
un sistem care variază în timp este unul în care unul sau mai mulți parametri variază în funcție de timp. Răspunsul depinde de momentul în care se aplică intrarea., Un sistem de control al vehiculului spațial în care masa scade cu timpul, pe măsură ce combustibilul pe care îl transportă este consumat în timpul zborului, este un exemplu de sistem care variază în timp.în sistemele de control continuu, toți parametrii sistemului sunt o funcție de timp continuu, t. un control discret în timp implică una sau mai multe variabile care sunt cunoscute numai la momente discrete de timp.
un timp continuu sau date continue este una în care semnalele de la diferite părți ale sistemului sunt funcții continue de timp. Aceste semnale sunt semnale în timp continuu., De exemplu, atunci când luăm în considerare controlul vitezei unui motor DC, știm că ieșirea, adică rotația în termeni de radiani pe secundă este o funcție de tensiune și curent furnizate ca intrare la acesta în mod continuu. Un astfel de sistem are o intrare continuă în timp și oferă o ieșire continuă în timp.
Single-Input-Single-Output (SISO) și Multi-Input–Multi-Output (MIMO)
un sistem cu o intrare și o ieșire se numește un sistem de control cu o singură intrare-o singură ieșire. Cu alte cuvinte, există o singură comandă și o ieșire controlată.,un sistem cu intrări multiple și ieșiri multiple se numește sistem de control multi-intrare–multi-ieșire. De exemplu, controlul nivelului tamburului cazanului, controlul brațului robotului etc. Brațul robotului îndeplinește mai multe funcții cu mai multe intrări. Aceste funcții multiple sunt numite gradul de libertate.
Catalogheaza Parametru și Distribuite Parametrul
sisteme de Control care pot fi descrise prin ecuații diferențiale ordinare sunt concentrate parametru sisteme de control întrucât distribuite parametru sistemele de control sunt descrise de ecuații cu derivate parțiale., Parametrii unei linii lungi de transmisie, adică rezistența, inductanța și capacitatea, sunt distribuiți de-a lungul liniei, dar pot fi considerați parametri în anumite puncte.un sistem de control este determinist dacă răspunsul este previzibil și repetabil. Dacă nu, Sistemul de control este un sistem de control stocastic care implică parametri variabili aleatorii.,
sisteme statice și dinamice
un sistem este numit dinamic sau dependent de timp dacă ieșirea sa actuală depinde de intrarea trecută, în timp ce un sistem static este cel al cărui curent de ieșire depinde numai de intrarea curentă.