
- ce este un Servo?
- cum pot controla un Servo?
- Cum pot controla un Servo de la un Arduino?
- Cum pot controla un Servo de la un Raspbery Pi?
- cum pot alimenta un Servo?
- cum trimit un semnal pe distanțe lungi?
- Cum pot roti un Servo o anumită cantitate (90°, 180°, continuu, etc)?
- Cum înlocuiesc un set de servomotoare?
- cum se măsoară viteza Servo?
- cum se măsoară cuplul Servo?
- la ce se referă” direcția ” unui Servo?
- ce este un servo Spline?,
ce este un Servo?
Cum pot controla un Servo?
spre deosebire de motoarele cu curent continuu periat, servo-urile nu pot fi rulate prin simpla aplicare a unei tensiuni. Pe lângă alimentarea tensiunii de alimentare (pe firul roșu) pentru ca motorul să tragă, trebuie trimis un semnal specific numit semnal PWM pe firul de semnal (de obicei galben sau alb). Acest semnal poate proveni dintr-o varietate de surse, cum ar fi servo controlere, receptoare RC, sau Arduinos.
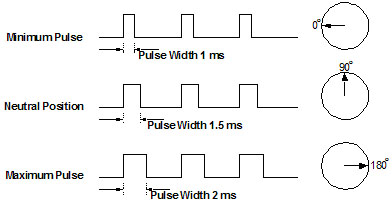
 servo-urile sunt controlate prin trimiterea unui impuls de lățime variabilă. Firul de control este folosit pentru a trimite acest impuls., Parametrii pentru acest impuls sunt că are un impuls minim, un impuls maxim și o rată de repetare. Dat rotație constrângeri de servo, neutru este definit a fi în poziția unde servo are exact aceeași cantitate de potențial de rotație în sensul acelor de ceasornic cum o face în sensul acelor de ceasornic. Este important de menționat că diferite servo-uri vor avea constrângeri diferite asupra rotației lor, dar toate au o poziție neutră, iar această poziție este întotdeauna în jur de 1.5 milisecunde (ms).,
servo-urile sunt controlate prin trimiterea unui impuls de lățime variabilă. Firul de control este folosit pentru a trimite acest impuls., Parametrii pentru acest impuls sunt că are un impuls minim, un impuls maxim și o rată de repetare. Dat rotație constrângeri de servo, neutru este definit a fi în poziția unde servo are exact aceeași cantitate de potențial de rotație în sensul acelor de ceasornic cum o face în sensul acelor de ceasornic. Este important de menționat că diferite servo-uri vor avea constrângeri diferite asupra rotației lor, dar toate au o poziție neutră, iar această poziție este întotdeauna în jur de 1.5 milisecunde (ms).,

unghiul este determinat de durata de puls care se aplică la controlul de sârmă. Aceasta se numește modulare a lățimii pulsului. Servo-ul se așteaptă să vadă un impuls la fiecare 20 ms. lungimea impulsului va determina cât de departe se întoarce motorul. De exemplu, un impuls de 1,5 ms va face ca motorul să se întoarcă în poziția de 90 de grade (poziție neutră).
când aceste servo-uri sunt comandate să se miște, se vor muta în poziție și vor menține acea poziție., În cazul în care o forță externă împinge împotriva servo în timp ce servo deține o poziție, servo va rezista la deplasarea din această poziție. Cantitatea maximă de forță pe care servo-ul o poate exercita este ratingul cuplului servo-ului. Servo – urile nu își vor menține poziția pentru totdeauna; pulsul de poziție trebuie repetat pentru a instrui servo-ul să rămână în poziție.când un impuls este trimis la un servo care este mai mică de 1,5 ms servo se rotește într-o poziție și deține arborele său de ieșire un număr de grade în sens invers acelor de ceasornic de la punctul neutru. Când pulsul este mai mare de 1,5 ms, apare opusul., Lățimea minimă și lățimea maximă a impulsului care va comanda servo-ului să se întoarcă într-o poziție validă sunt funcții ale fiecărui servo. Diferitele mărci, și chiar diferite servo-uri ale aceleiași mărci, vor avea maxime și minime diferite. În general, pulsul minim va fi de aproximativ 1 ms lățime, iar pulsul maxim va fi de 2 ms lățime.
un Alt parametru care variază de la servo la servo este la rândul său ritm. Acesta este timpul necesar de la servo pentru a schimba de la o poziție la alta., Timpul de cotitură cel mai rău caz este atunci când servo-ul se menține la rotația minimă și este comandat să meargă la rotația maximă. Acest lucru poate dura câteva secunde pe servo-uri cu cuplu foarte mare.scopul acestor informații este de a oferi o imagine de ansamblu a modului în care funcționează servo-urile și modul de comunicare cu acestea. Deși am luat măsuri pentru a asigura calitatea informațiilor aici, ServoCity nu oferă garanții cu privire la informațiile prezentate. ServoCity nu poate fi trasă la răspundere sau răspunzătoare pentru orice utilizare sau utilizare necorespunzătoare a informațiilor furnizate., Dacă aveți întrebări cu privire la aceste informații vă rugăm să e-mail [email protected].
Cum pot controla un Servo de la un Arduino?
Cum pot controla un Servo de la un Raspberry Pi?
în timp ce Raspberry Pis poate emite un semnal PWM, adesea nu sunt în măsură să mențină un semnal curat din cauza lipsei unui cronometru dedicat. Dacă controlați servo-urile de la un Raspberry Pi, vă recomandăm cu tărie să obțineți o pălărie servo pentru raspberry pi.
Cum pot alimenta un Servo?,
cel mai bun mod de a alimenta un servo este cu o baterie cu o tensiune în intervalul de tensiune specificat în tabelul de specificații servo pages. Asigurați-vă că utilizați o baterie sănătoasă care poate furniza mai mult decât suficient curent. Deoarece curentul este tras și nu împins, având mai mult curent disponibil decât este necesar nu va afecta servo (este ca și cum ai avea mai mult gaz decât ai nevoie pentru a ajunge undeva în mașină). Puterea motorului servo este furnizată pe firul roșu., Poate fi util să tăiați firul roșu (sau să folosiți un X-Acto pentru a trage conectorul din carcasă), astfel încât să puteți furniza energie separat de semnal. Acest lucru vă va permite să alimentați receptorul pe o baterie diferită de servo-ul dvs. dacă au nevoie de tensiuni diferite. De asemenea, v-ar permite să alimentați motorul servo-ului dvs. direct de la o baterie, în timp ce semnalul provine de la un Arduino, deoarece pinii Arduino nu pot gestiona tipul de curent de care are nevoie un servo (în general, max la 40mA).
cum trimit un semnal pe distanțe lungi?,uneori, atunci când trimiteți un semnal pe o distanță lungă, semnalul se poate degrada din cauza căderii de tensiune și a interferențelor electromagnetice (EMI). Un amplificator de semnal servo poate rezolva aceste probleme și poate facilita transmiterea semnalului pe o distanță mare de sârmă.
Cum pot roti un Servo o anumită cantitate (90°, 180°, continuu, etc)?
 când sunt controlate cu un sistem de control radio, majoritatea servo-urilor hobby oferă o rotație de 90° (45° în orice direcție) chiar din cutie., Acest lucru poate fi uneori mărit dacă sistemul dvs. radio oferă ajustări ale punctului final sau dacă servomotorul dvs. are un știft de jumper de 180°. Dacă utilizați Servo-uri digitale Hitec, pur și simplu doriți să achiziționați programatorul de mână pentru a crește rotația. Dacă aveți un servo analogic Hitec sau Futaba care oferă doar 90° de rotație, cantitatea de rotație poate fi uneori mărită la 180° prin efectuarea unei modificări simple.
când sunt controlate cu un sistem de control radio, majoritatea servo-urilor hobby oferă o rotație de 90° (45° în orice direcție) chiar din cutie., Acest lucru poate fi uneori mărit dacă sistemul dvs. radio oferă ajustări ale punctului final sau dacă servomotorul dvs. are un știft de jumper de 180°. Dacă utilizați Servo-uri digitale Hitec, pur și simplu doriți să achiziționați programatorul de mână pentru a crește rotația. Dacă aveți un servo analogic Hitec sau Futaba care oferă doar 90° de rotație, cantitatea de rotație poate fi uneori mărită la 180° prin efectuarea unei modificări simple.
Notă: puteți achiziționa Servo Hitec de la noi, care sunt pre-modificate în propria noastră unitate de producție pe paginile individuale Hitec servo., Această modificare anulează toate garanțiile Servocity și Hitec.
Cum înlocuiesc un set de servomotoare?
cum se măsoară viteza Servo?
cum se măsoară cuplul Servo?
la ce se referă” direcția ” unui Servo?
toate servo-urile se vor roti în sensul acelor de ceasornic și în sens invers acelor de ceasornic. Direcția servo se rotește totul depinde de semnalul servo primește. Nu toate servo-urile se potrivesc în ceea ce privește direcția de rotație chiar din cutie., Dacă conectați un servo Hitec la receptorul de control radio sau la servo controler și îi spuneți servo-ului să se întoarcă spre dreapta (în sensul acelor de ceasornic), acesta se va deplasa spre dreapta. Dacă apoi conectați un servo Futaba în același receptor sau servo controler și spuneți-i să meargă în aceeași direcție ca și servo-ul Hitec, acesta se va deplasa în direcția opusă (în sens invers acelor de ceasornic). Aceasta este o soluție ușoară cu majoritatea sistemelor de control radio, deoarece au o funcție servo de inversare
pe transmițător., Această diferență între producători este motivul pentru care fiecare servo va avea o specificație care să indice direcția în care servo-ul se va deplasa cu un semnal PWM în creștere.
ce este un servo Spline?
arborele de ieșire dințat al unui servo este denumit în general spline servo. Pentru o defalcare a tuturor diferitelor tipuri de servo spline pe servo-urile pe care le vindem, verificați intrarea Servo Spline în glosarul nostru.