
- co to jest serwo?
- jak sterować serwo?
- jak sterować serwo z Arduino?
- jak sterować serwo z Raspbery Pi?
- jak zasilić serwo?
- Jak wysłać sygnał na dużą odległość?
- jak obrócić serwo o określoną ilość (90°, 180°, ciągły itp.)?
- Jak wymienić zestaw przekładni serwo?
- jak mierzy się prędkość serwo?
- jak mierzy się Moment Obrotowy serwo?
- do czego odnosi się „kierunek” serwo?
- co to jest serwo Spline?,
Co To jest serwo?
Jak sterować serwo?
w przeciwieństwie do szczotkowanych silników prądu stałego, Serwomechanizmy nie mogą być uruchamiane po prostu przez zastosowanie napięcia. Oprócz zasilania napięciem zasilającym (na czerwonym przewodzie), z którego silnik może wyciągnąć, na przewodzie sygnałowym musi być wysłany określony sygnał zwany sygnałem PWM (zwykle żółty lub biały). Sygnał ten może pochodzić z różnych źródeł, takich jak serwo Kontrolery, odbiorniki RC lub Arduinos.
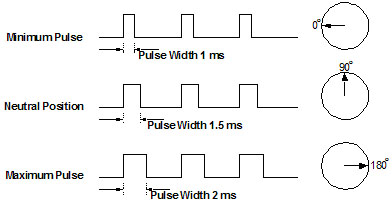
 Serwomechanizmy są sterowane przez wysyłanie im impulsu o zmiennej szerokości. Przewód sterujący służy do wysyłania tego impulsu., Parametry tego impulsu są takie, że ma minimalny impuls, maksymalny impuls i częstotliwość powtarzania. Biorąc pod uwagę ograniczenia obrotu serwomechanizmu, neutralne jest zdefiniowane jako pozycja, w której serwomechanizm ma dokładnie taki sam potencjał obrotu w kierunku zgodnym z ruchem wskazówek zegara, jak w kierunku przeciwnym do ruchu wskazówek zegara. Ważne jest, aby pamiętać, że różne Serwomechanizmy będą miały różne ograniczenia dotyczące ich obrotu, ale wszystkie mają neutralną pozycję, a ta pozycja wynosi zawsze około 1,5 milisekundy (ms).,
Serwomechanizmy są sterowane przez wysyłanie im impulsu o zmiennej szerokości. Przewód sterujący służy do wysyłania tego impulsu., Parametry tego impulsu są takie, że ma minimalny impuls, maksymalny impuls i częstotliwość powtarzania. Biorąc pod uwagę ograniczenia obrotu serwomechanizmu, neutralne jest zdefiniowane jako pozycja, w której serwomechanizm ma dokładnie taki sam potencjał obrotu w kierunku zgodnym z ruchem wskazówek zegara, jak w kierunku przeciwnym do ruchu wskazówek zegara. Ważne jest, aby pamiętać, że różne Serwomechanizmy będą miały różne ograniczenia dotyczące ich obrotu, ale wszystkie mają neutralną pozycję, a ta pozycja wynosi zawsze około 1,5 milisekundy (ms).,

kąt zależy od czasu trwania impulsu przyłożonego do przewodu sterującego. Nazywa się to modulacją szerokości impulsu. Serwo oczekuje, że co 20 ms zobaczy impuls. długość impulsu określi, jak daleko silnik się obraca. Na przykład impuls 1,5 ms sprawi, że silnik obróci się do pozycji 90 stopni (pozycja neutralna).
gdy te Serwomechanizmy mają się poruszać, przesuwają się do pozycji i utrzymują tę pozycję., Jeśli siła zewnętrzna naciska na serwo, gdy serwo utrzymuje pozycję, serwo będzie się opierać od ruchu z tej pozycji. Maksymalna siła, jaką może wywierać serwo, to moment obrotowy serwo. Serwomechanizmy nie utrzymają swojej pozycji na zawsze; impuls pozycji należy powtórzyć, aby polecić serwomechanizmowi pozostanie na pozycji.
gdy impuls jest wysyłany do serwo, które jest mniejsze niż 1,5 ms, serwo obraca się do pozycji i utrzymuje wał wyjściowy pewną liczbę stopni w kierunku przeciwnym do ruchu wskazówek zegara od punktu neutralnego. Gdy impuls jest szerszy niż 1,5 ms następuje odwrotnie., Minimalna szerokość i maksymalna szerokość impulsu, które każą serwomechanizmowi obrócić się w prawidłową pozycję, są funkcjami każdego serwomechanizmu. Różne marki, a nawet różne serwa tej samej marki, będą miały różne maksimum i minimum. Ogólnie minimalny impuls będzie o szerokości 1 ms, a maksymalny impuls będzie o szerokości 2 ms.
innym parametrem różniącym się od serwa do serwa jest szybkość obrotów. Jest to czas potrzebny serwomechanizmowi na zmianę z jednej pozycji na drugą., W najgorszym przypadku czas skrętu jest wtedy, gdy serwo trzyma się przy minimalnym obrocie i nakazuje się mu przejść do maksymalnego obrotu. Może to potrwać kilka sekund na serwomechanizmach o bardzo wysokim momencie obrotowym.
celem tych informacji jest przedstawienie przeglądu działania serwomechanizmów i sposobu komunikowania się z nimi. Chociaż podjęliśmy kroki w celu zapewnienia jakości informacji tutaj, Servicity nie daje żadnych gwarancji co do prezentowanych informacji. Servicity nie ponosi odpowiedzialności za jakiekolwiek użycie lub niewłaściwe wykorzystanie podanych informacji., Jeśli masz pytania dotyczące tych informacji, napisz e-mail [email protected].
Jak sterować serwo z Arduino?
Jak sterować serwo z Raspberry Pi?
podczas gdy Raspberry Pis może wyprowadzać sygnał PWM, często nie są w stanie utrzymać czystego sygnału z powodu braku dedykowanego timera. Jeśli kontrolujesz serwa z Raspberry Pi, zdecydowanie zalecamy uzyskanie czapki serwo dla raspberry pi.
Jak zasilić serwo?,
najlepszym sposobem zasilania serwomechanizmu jest bateria o napięciu w zakresie napięcia określonym w tabeli specyfikacji stron serwomechanizmu. Upewnij się, że używasz zdrowej baterii, która może dostarczyć więcej niż wystarczająco dużo prądu. Ponieważ prąd jest ciągnięty i nie popychany, posiadanie większej ilości prądu niż jest potrzebne, nie zaszkodzi serwomechanizmowi (to tak, jakby mieć więcej gazu niż potrzebujesz, aby dostać się gdzieś w samochodzie). Moc silnika serwo jest dostarczana na czerwonym przewodzie., Przydałoby się przeciąć czerwony przewód (lub użyć X-Acto, aby wyciągnąć złącze z obudowy), aby można było zasilać oddzielnie od sygnału. Pozwoliłoby to na zasilanie odbiornika na innej baterii niż serwo, jeśli potrzebują różnych napięć. Pozwoli to również na zasilanie silnika serwo bezpośrednio z akumulatora, podczas gdy sygnał pochodzi z Arduino, ponieważ Szpilki Arduino nie mogą obsłużyć rodzaju prądu, którego potrzebuje serwo (Zwykle MAX przy 40mA).
Jak wysłać sygnał na dużą odległość?,
czasami podczas wysyłania sygnału na duże odległości, sygnał może ulec pogorszeniu z powodu spadku napięcia i zakłóceń elektromagnetycznych (EMI). Wzmacniacz sygnału serwo może rozwiązać te problemy i ułatwić przesyłanie sygnału na dużą odległość przewodu.
Jak obrócić serwo o określoną ilość (90°, 180°, ciągły itp.)?
 przy sterowaniu za pomocą systemu sterowania radiowego, większość serwomechanizmów hobby oferuje obrót o 90° (45° w dowolnym kierunku) zaraz po wyjęciu z pudełka., Czasami można to zwiększyć, jeśli system radiowy oferuje regulację punktu końcowego lub sterownik serwo ma sworzeń zworki 180°. Jeśli używasz serwa cyfrowego Hitec, po prostu chcesz kupić ręczny programator, aby zwiększyć obroty. Jeśli masz analogowe serwo Hitec lub Futaba, które oferuje tylko obrót o 90°, ilość obrotów można czasami zwiększyć do 180°, wykonując prostą modyfikację.
przy sterowaniu za pomocą systemu sterowania radiowego, większość serwomechanizmów hobby oferuje obrót o 90° (45° w dowolnym kierunku) zaraz po wyjęciu z pudełka., Czasami można to zwiększyć, jeśli system radiowy oferuje regulację punktu końcowego lub sterownik serwo ma sworzeń zworki 180°. Jeśli używasz serwa cyfrowego Hitec, po prostu chcesz kupić ręczny programator, aby zwiększyć obroty. Jeśli masz analogowe serwo Hitec lub Futaba, które oferuje tylko obrót o 90°, ilość obrotów można czasami zwiększyć do 180°, wykonując prostą modyfikację.
Uwaga: możesz kupić od nas serwa Hitec, które są wstępnie zmodyfikowane w naszym własnym zakładzie produkcyjnym na poszczególnych stronach serwo Hitec., Ta modyfikacja unieważnia wszystkie gwarancje ServoCity i Hitec.
Jak wymienić zestaw przekładni serwo?
Jak mierzy się prędkość serwo?
Jak mierzy się Moment Obrotowy serwo?
do czego odnosi się „kierunek” serwo?
wszystkie serwa będą obracać się zgodnie z ruchem wskazówek zegara i przeciwnie do ruchu wskazówek zegara. Kierunek, w którym obraca się serwo, zależy od sygnału, który odbiera serwo. Nie wszystkie Serwomechanizmy pasują do kierunku obrotów zaraz po wyjęciu z pudełka., Jeśli podłączysz serwo Hitec do odbiornika radiowego lub kontrolera serwo i powiesz serwo, aby obrócił się w prawo (zgodnie z ruchem wskazówek zegara), przesunie się w prawo. Jeśli następnie podłączysz serwo Futaba do tego samego odbiornika lub kontrolera serwo i powiesz mu, aby szedł w tym samym kierunku, co serwo Hitec, przesunie się w przeciwnym kierunku (przeciwnie do ruchu wskazówek zegara). Jest to łatwe rozwiązanie w przypadku większości systemów sterowania radiowego, ponieważ mają one funkcję odwracania serwo
na nadajniku., Ta różnica między producentami jest powodem, dla którego każde serwo będzie miało specyfikację wzywającą kierunek, w którym serwo będzie się poruszać z rosnącym sygnałem PWM.
Co to jest serwo Spline?
zębaty wał wyjściowy serwomechanizmu jest ogólnie nazywany serwomechanizmem. Aby zapoznać się ze wszystkimi rodzajami szyn serwomechanizmów sprzedawanych przez nas serwomechanizmów, zapoznaj się z wpisem Servo Spline w naszym słowniczku.