spis treści
system sterowania
systemy sterowania odgrywają istotną rolę w naszym codziennym życiu. Pojęcie automatycznego systemu sterowania jest podstawowe i dobrze wymieszane w każdym aspekcie naszego życia. Automatyczny system sterowania odgrywa ważną rolę w rozwoju i doskonaleniu umiejętności inżynierskich.,
system jest kombinacją urządzeń i komponentów połączonych ze sobą przez jakąś formę regularnych interakcji, aby działać razem i realizować określony cel. System może być fizyczny, biologiczny, ekonomiczny i tym podobne.
termin kontrola oznacza regulować, kierować lub rozkazywać. Tak więc system sterowania może być zdefiniowany jako zespół urządzeń i komponentów połączonych lub powiązanych w celu sterowania, kierowania lub regulacji siebie lub innego systemu.,
Systemy sterowania stosowane są w wielu zastosowaniach, na przykład do regulacji temperatury, poziomu cieczy, położenia, prędkości, przepływu, ciśnienia, przyspieszenia itp.
cechy systemu sterowania
główną cechą systemu sterowania jest to, że powinien istnieć wyraźny związek matematyczny między wejściem i wyjściem systemu. Gdy relacja między wejściem a wyjściem układu może być reprezentowana przez proporcjonalność liniową, układ nazywa się liniowym układem sterowania., Ponownie, gdy relacja między wejściem i wyjściem nie może być reprezentowana przez pojedynczą proporcjonalność liniową, a raczej wejście i wyjście są powiązane przez pewną nieliniową relację, system jest określany jako nieliniowy system sterowania.
wymagania dobrego układu sterowania
Dokładność: Dokładność jest tolerancją pomiarową przyrządu i określa granice błędów popełnianych podczas użytkowania przyrządu w normalnych warunkach pracy. Dokładność można poprawić za pomocą elementów sprzężenia zwrotnego., Aby zwiększyć dokładność detektora błędów systemu sterowania powinien być obecny w systemie sterowania.
czułość: parametry układu sterowania zawsze zmieniają się wraz ze zmianą warunków otoczenia, zakłóceń wewnętrznych lub innych parametrów. Zmiana ta może być wyrażona w kategoriach czułości. Każdy układ sterowania powinien być niewrażliwy na takie parametry, ale wrażliwy wyłącznie na sygnały wejściowe.
szum: niepożądany sygnał wejściowy jest znany jako szum. Dobry system sterowania powinien być w stanie zmniejszyć efekt hałasu dla lepszej wydajności.,
stabilność: jest to ważna cecha układu sterowania. Dla ograniczonego sygnału wejściowego, wyjście musi być ograniczone, a jeśli wejście jest zerem, to wyjście musi być zerem, to taki układ sterowania mówi się, że jest układem stabilnym.
Bandwidth: Zakres Częstotliwości roboczej decyduje o szerokości pasma systemu sterowania. Szerokość pasma powinna być jak największa Dla odpowiedzi częstotliwościowej dobrego układu sterowania.
prędkość: jest to czas potrzebny systemowi sterowania na osiągnięcie stabilnej wydajności. Dobry system sterowania ma dużą prędkość., Okres przejściowy dla takiego systemu jest bardzo mały.
oscylacja: niewielka liczba oscylacji lub stała oscylacja wyjścia wskazuje, że system jest stabilny.
podstawowe komponenty systemu sterowania
podstawowe komponenty systemu sterowania mogą być reprezentowane przez:
- referencyjny element wejściowy, który powoduje sygnał polecenia;
- element sprzężenia zwrotnego, który wytwarza sygnał sprzężenia zwrotnego;
- detektor błędów;
- kontroler;
- kontrolowany system; i
- sygnał wyjściowy, czyli kontrolowane wyjście.,
elementy te są przedstawione w postaci schematu blokowego systemu, jak na poniższym rysunku i są opisane w następujący sposób.
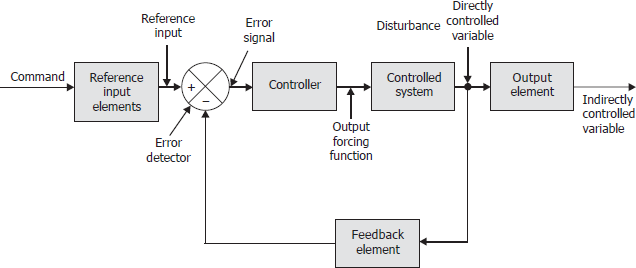
- referencyjne elementy wejściowe: stanowią one pozycję systemu sterowania sprzężeniem zwrotnym, który ustanawia związek między poleceniem a pewnym referencyjnym wejściem.,
- polecenie: polecenie jest celowo wprowadzonym sygnałem ustanowionym w jakiś sposób, zewnętrznym i niezależnym od rozpatrywanego układu sterowania sprzężeniem zwrotnym.
- wejście odniesienia: jest to sygnał ustalony jako standard porównawczy dla układu sterowania sprzężeniem zwrotnym ze względu na jego stosunek do polecenia.
- detektor błędów: jest to element, w którym jedna zmienna systemowa (sygnał sprzężenia zwrotnego) jest odejmowana od innej zmiennej (Sygnał odniesienia) w celu uzyskania trzeciej zmiennej (sygnał błędu). Jest również nazywany komparatorem.,
- element Sprzężenia Zwrotnego: sygnał sprzężenia zwrotnego jest funkcją kontrolowanego wyjścia, która jest porównywana z sygnałem odniesienia w celu uzyskania sygnału uruchamiającego.
- sygnał błędu: jest to algebraiczna suma wejścia odniesienia i podstawowego sprzężenia zwrotnego.
- Kontroler: Kontroler jest elementem wymaganym do wygenerowania odpowiedniego sygnału sterującego.
- funkcja wymuszania wyjścia: jest to warunek, który jest zmienny w funkcji sygnału uruchamiającego, tak aby zmienić wartość kontrolowanej zmiennej.,
- System kontrolowany: jest to ciało, proces lub maszyna, której określony stan ma być kontrolowany, na przykład statek kosmiczny, reaktor, kocioł, maszyna CNC itp.
- zmienna sterowana: jest zmienną, która jest bezpośrednio mierzona i kontrolowana. Zakłócenie jest wejściem innym niż polecenie, które ma tendencję do wpływania na wartość kontrolowanej zmiennej.
- Elementy wyjściowe: są to elementy, które określają zależność między zmienną sterowaną bezpośrednio i zmienną sterowaną pośrednio.,
Klasyfikacja układu sterowania
układ sterowania w otwartej pętli
układ sterowania, który nie może dostosować się do zmian, nazywa się układem sterowania w otwartej pętli. Ogólnie rzecz biorąc, ręczne systemy sterowania są systemami o otwartej pętli. SCHEMAT BLOKOWY układu sterowania w pętli otwartej przedstawiono na rysunku poniżej.,

tutaj r(T) jest sygnałem wejściowym, u(T) jest sygnałem sterującym/uruchamiającym sygnał i C(T) jest sygnałem wyjściowym.
w tym systemie wyjście pozostaje niezmienione dla stałego wejścia. W przypadku rozbieżności dane wejściowe powinny być ręcznie zmieniane przez operatora., Układ sterowania z otwartą pętlą jest odpowiedni, gdy istnieje tolerancja na wahania w systemie i gdy zmienność parametrów systemu może być obsługiwana niezależnie od warunków środowiskowych.
zalety systemu Open-loop
- systemy te są proste w budowie i projektowaniu.
- systemy otwartej pętli są ekonomiczne.
- systemy te są łatwe z punktu widzenia konserwacji.
- zazwyczaj systemy te nie są zbytnio kłopotliwe z problemami stabilności.
- systemy te są wygodne w użyciu, gdy wyjście jest trudne do zmierzenia.,
wady
- systemy te nie są dokładne i niezawodne, ponieważ ich dokładność zależy od dokładności kalibracji.
- w tych układach uzyskuje się niedokładne wyniki ze zmiennościami parametrów, czyli zaburzeniami wewnętrznymi.
- Rekalibracja Sterownika jest wymagana od czasu do czasu dla zachowania jakości i dokładności.
System Sterowania W Pętli Zamkniętej
każdy system, który może samodzielnie reagować na zmiany i wprowadzać poprawki, jest znany jako system sterowania w pętli zamkniętej., Jedyną różnicą między układami z pętlą otwartą i zamkniętą jest działanie sprzężenia zwrotnego. SCHEMAT BLOKOWY układu sterowania w pętli zamkniętej przedstawiono na rysunku poniżej.
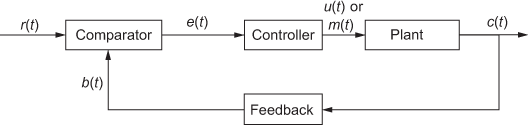
tutaj, wyjście maszyna jest doprowadzana z powrotem do komparatora (wykrywacz błędów). Sygnał wyjściowy jest porównywany z wejściem odniesienia r(t), A sygnał błędu e (t) jest wysyłany do sterownika., Na podstawie błędu sterownik dostosowuje wejście klimatyzatora . Proces ten jest kontynuowany, dopóki błąd nie zostanie anulowany. Zarówno sterowanie ręczne, jak i automatyczne mogą być realizowane w systemie zamkniętej pętli. Ogólny zysk systemu jest zmniejszony ze względu na obecność sprzężenia zwrotnego. Aby zrekompensować zmniejszenie wzmocnienia, jeśli wzmacniacz jest wprowadzony w celu zwiększenia wzmocnienia systemu, system może czasami stać się niestabilny.
zalety systemu close-loop
- w tych systemach dokładność jest bardzo wysoka ze względu na korektę powstającego błędu.,
- ponieważ systemy te wyczuwają zmiany środowiska, a także zakłócenia wewnętrzne, błąd jest modyfikowany.
- w tych układach występuje zredukowany efekt nieliniowości.
- systemy te mają dużą przepustowość, czyli wysoką strefę częstotliwości pracy.
- w tych systemach znajdują się urządzenia automatyki.
wady
- systemy są skomplikowane w projektowaniu.
- systemy close-loop są bardziej kosztowne.
- systemy te mogą być niestabilne.,
niektóre przykłady systemów sterowania w pętli otwartej i zamkniętej są następujące:
- Systemy sygnalizacji świetlnej różnią się w działaniu. Niektóre systemy są zamknięte w pętli, a niektóre są otwarte w pętli. W typie otwartej pętli istnieje mechanizm czasowy, który jest ustawiony na przełączanie świateł w regularnych odstępach czasu, niezależnie od natężenia ruchu. Jednak w przypadku pętli zamkniętej ilość ruchu przechodzącego przez skrzyżowania jest monitorowana (elektronicznie lub w inny sposób), a czas trwania warunków „czerwonych” i „zielonych” jest odpowiednio dostosowywany dla każdej części skrzyżowania.,
- przykładem działania systemu otwartej pętli jest myjnia samochodowa, w której wszystkie samochody otrzymują taką samą ilość prania, niezależnie od tego, jak są brudne. Tutaj wyjściem jest czystość samochodów, która odpowiada danemu ustawieniu maszyny (ilość wody i czas mycia). Człowiek, który myje samochody, automatycznie upewnia się, że brudniejsze samochody otrzymują więcej uwagi niż inne. Mycie samochodów przez odpowiedzialnego człowieka jest więc systemem sterowania w pętli zamkniętej. Zwykła pralka to system z otwartą pętlą.,
- lodówka jest systemem zamkniętym. Jego temperatura jest mierzona za pomocą termostatu, który włącza silnik, gdy temperatura wzrośnie powyżej pożądanej wartości i wyłącza silnik, gdy temperatura ponownie osiągnie pożądaną wartość.
- oświetlenie pokoju jest systemem otwartej pętli. Po włączeniu światła pozostanie włączone (dopóki nie zostanie wyłączone ) niezależnie od tego, czy pomieszczenie jest ciemne, czy jasne.
różnice między systemami pętli otwartej i zamkniętej
| S.,Nie. | system pętli otwartej | system pętli zamkniętej |
| 1 | element sprzężenia zwrotnego jest nieobecny. | element sprzężenia zwrotnego zawsze obecny. |
| 2 | wykrywacz błędów nie jest obecny. | wykrywacz błędów jest zawsze obecny. |
| 3 | system otwartej pętli jest ogólnie stabilny. | system zamkniętej pętli może stać się niestabilny w pewnych warunkach. |
| 4 | mogą mieć wpływ nieliniowości w systemie. | mogą regulować efekty nieliniowości obecnych w systemie., |
| 5 | jest łatwy do skonstruowania. | ma skomplikowaną konstrukcję. |
| 6 | jest ekonomiczny. | jest to kosztowne. |
| 7 | ma małą przepustowość. | ma dużą przepustowość. |
| 8 | są one na ogół niedokładne. | są dokładne. |
| 9 | ma mniej konserwacji. | ma więcej konserwacji. |
| 10 | jest zawodny. | jest niezawodny., |
| 11 | Examples: Washing machine, fixed time traffic control system, room heater, etc | Examples: Servomotor control, generator output voltage control system, refrigerator, biological system, etc. |
Other Types of Control Systems
Linear and Non-linear
A linear system is one that obeys the principle of superposition., Zasada superpozycji mówi, że odpowiedź wytworzona przez jednoczesne zastosowanie dwóch różnych funkcji wymuszających jest równa sumie poszczególnych odpowiedzi.
Układy nieliniowe nie spełniają zasady superpozycji. Prawie wszystkie praktyczne systemy są do pewnego stopnia nieliniowe. Nieliniowość jest wprowadzana ze względu na efekt nasycenia elementów systemu, siły tarcia, gra między przekładniami, połączenia mechaniczne, Nieliniowość elementów elektronicznych, takich jak wzmacniacze mocy, tranzystory itp., używane., Sterowanie układami liniowymi jest łatwe w porównaniu do sterowania układami nieliniowymi.
Time-invariant i Time-Variant
system kontroli niezmiennej czasu to taki, którego parametry NIE zmieniają się w czasie. Reakcja takiego systemu jest niezależna od czasu, w którym dane wejściowe są stosowane. Dla przykładu, rezystancja, indukcyjność i pojemność sieci elektrycznej są niezależne od czasu.
system zmienny w czasie to taki, w którym jeden lub więcej parametrów zmienia się w czasie. Odpowiedź zależy od czasu, w którym dane wejściowe są stosowane., Układ sterowania pojazdem kosmicznym, w którym masa maleje wraz z upływem czasu, ponieważ przewożone przez niego paliwo zużywa się podczas lotu, jest przykładem układu zmieniającego czas.
czas ciągły i dyskretny
w systemach sterowania ciągłego wszystkie parametry systemu są funkcją czasu ciągłego, t. sterowanie czasem dyskretnym obejmuje jedną lub więcej zmiennych, które są znane tylko w dyskretnych momentach czasu.
dane ciągłe-czas lub dane ciągłe to takie, w których sygnały w różnych częściach systemu są ciągłymi funkcjami czasu. Sygnały te są ciągłymi sygnałami czasu., Na przykład, gdy rozważymy regulację prędkości silnika PRĄDU STAŁEGO, wiemy, że wyjście, czyli obrót w radianach na sekundę jest funkcją napięcia i prądu dostarczanego jako wejście do niego w czasie ciągłym. Taki system przyjmuje wejście w czasie ciągłym i zapewnia wyjście w czasie ciągłym.
Single-Input–Single-Output (SISO) i Multi-Input–Multi-Output (MIMO)
system z jednym wejściem i Jednym Wyjściem nazywa się systemem sterowania single-input–single-output. Innymi słowy, istnieje tylko jedno polecenie i jedno kontrolowane wyjście.,
system z wieloma wejściami i wieloma wyjściami nazywany jest systemem sterowania multi-input–multi-output. Na przykład kontrola poziomu bębna kotła, sterowanie ramieniem robota itp. Ramię robota wykonuje wiele funkcji z wieloma wejściami. Te wielorakie funkcje nazywane są stopniem swobody.
Lumped Parameter and Distributed Parameter
Systemy sterowania, które mogą być opisane za pomocą zwykłych równań różniczkowych, są układami sterowania parametrami lumped, podczas gdy rozproszone systemy sterowania parametrami są opisane za pomocą równań różniczkowych cząstkowych., Parametry długiej linii przesyłowej, czyli rezystancja, indukcyjność i Pojemność, są rozłożone wzdłuż linii, ale można je uznać za parametry sprzężone w pewnych punktach.
deterministyczny i stochastyczny
układ sterowania jest deterministyczny, jeśli odpowiedź jest przewidywalna i powtarzalna. Jeśli nie, układ sterowania jest stochastycznym układem sterowania, który obejmuje parametry zmiennych losowych.,
Układy statyczne i dynamiczne
układ nazywa się dynamicznym lub zależnym od czasu, jeśli jego obecne wyjście zależy od przeszłego wejścia, natomiast układ statyczny jest tym, którego bieżące wyjście zależy tylko od bieżącego wejścia.