
- Wat is een Servo?
- Hoe beheer ik een Servo?
- hoe Bestuur ik een Servo vanuit een Arduino?
- hoe Bestuur ik een Servo vanaf een Raspbery Pi?
- Hoe start ik een Servo?
- Hoe verzend ik een signaal over een lange afstand?
- Hoe draai ik een Servo een bepaalde hoeveelheid (90°, 180°, continu, etc)?
- Hoe vervang ik een Servomotorset?
- Hoe wordt de Servosnelheid gemeten?
- Hoe wordt het Servomoment gemeten?
- Wat is de” richting ” van een Servo waarnaar wordt verwezen?
- Wat is een Servo Spline?,
Wat is een Servo?
hoe Bestuur ik een Servo?
in tegenstelling tot geborstelde gelijkstroommotoren kunnen servo ‘ s niet worden uitgevoerd door simpelweg een spanning toe te passen. Naast het leveren van voedingsspanning (op de rode draad) voor de motor om uit te trekken, moet een specifiek signaal genaamd een PWM-signaal worden verzonden op de signaaldraad (meestal geel of wit). Dit signaal kan afkomstig zijn van verschillende bronnen, zoals servo controllers, RC ontvangers of Arduinos.
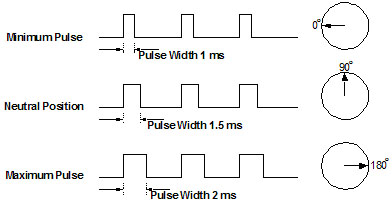
 Servos worden bestuurd door ze een puls van variabele breedte te sturen. De stuurdraad wordt gebruikt om deze puls te verzenden., De parameters voor deze puls zijn dat het een minimale puls, een maximale puls en een herhalingssnelheid heeft. Gezien de rotatiebeperkingen van de servo, wordt neutraal gedefinieerd als de positie waar de servo precies dezelfde hoeveelheid potentiële rotatie in de richting met de klok mee heeft als in de richting tegen de klok in. Het is belangrijk op te merken dat verschillende servo ‘ s verschillende beperkingen zullen hebben op hun rotatie, maar ze hebben allemaal een neutrale positie, en die positie is altijd rond 1,5 milliseconden (ms).,
Servos worden bestuurd door ze een puls van variabele breedte te sturen. De stuurdraad wordt gebruikt om deze puls te verzenden., De parameters voor deze puls zijn dat het een minimale puls, een maximale puls en een herhalingssnelheid heeft. Gezien de rotatiebeperkingen van de servo, wordt neutraal gedefinieerd als de positie waar de servo precies dezelfde hoeveelheid potentiële rotatie in de richting met de klok mee heeft als in de richting tegen de klok in. Het is belangrijk op te merken dat verschillende servo ‘ s verschillende beperkingen zullen hebben op hun rotatie, maar ze hebben allemaal een neutrale positie, en die positie is altijd rond 1,5 milliseconden (ms).,

de hoek wordt bepaald door de duur van een puls die op de bedieningsdraad wordt uitgeoefend. Dit wordt pulsbreedtemodulatie genoemd. De servo verwacht elke 20 ms een puls te zien. de lengte van de puls zal bepalen hoe ver de motor draait. Bijvoorbeeld, zal een 1.5 lidstaten impuls de motor draaien naar de 90 graadpositie (neutrale positie).
als deze servo ‘ s moeten bewegen, zullen ze naar de positie gaan en die positie behouden., Als een externe kracht tegen de servo drukt terwijl de servo een positie vasthoudt, zal de servo zich verzetten om uit die positie te bewegen. De maximale kracht die de servo kan uitoefenen is het koppelvermogen van de servo. Servo ‘ s zullen hun positie echter niet eeuwig behouden; de positiepuls moet worden herhaald om de servo te instrueren om in positie te blijven.
wanneer een puls naar een servo van minder dan 1,5 ms wordt gestuurd, draait de servo naar een positie en houdt de uitgaande as een aantal graden tegen de klok in van het neutrale punt. Wanneer de puls breder is dan 1,5 ms treedt het tegenovergestelde op., De minimale breedte en de maximale breedte van de puls die de servo opdracht geeft om naar een geldige positie te draaien, zijn functies van elke servo. Verschillende merken, en zelfs verschillende servo ‘ s van hetzelfde merk, hebben verschillende maximum-en minima. Over het algemeen zal de minimale puls ongeveer 1 ms breed zijn en de maximale puls 2 ms breed.
een andere parameter die varieert van servo tot servo is de draaisnelheid. Dit is de tijd die de servo nodig heeft om van de ene positie naar de andere te veranderen., De slechtst mogelijke draaitijd is wanneer de servo op de minimale rotatie houdt en het wordt bevolen om naar maximale rotatie te gaan. Dit kan enkele seconden duren bij servo ‘ s met een zeer hoog koppel.
Het doel van deze informatie is een overzicht te geven van hoe servo ‘ s werken en hoe met hen te communiceren. Hoewel we stappen hebben genomen om de kwaliteit van de informatie hier te verzekeren, ServoCity maakt geen garanties over de gepresenteerde informatie. ServoCity kan niet aansprakelijk of aansprakelijk worden gesteld voor enig gebruik of misbruik van de verstrekte informatie., Als u vragen heeft over deze informatie kunt u een e-mail sturen [email protected].
hoe Bestuur ik een Servo vanuit een Arduino?
hoe Bestuur ik een Servo vanaf een Raspberry Pi?
terwijl Raspberry Pi ‘ s een PWM-signaal kunnen uitvoeren, zijn ze vaak niet in staat om een schoon signaal te behouden vanwege het ontbreken van een speciale timer. Als u servos van een Raspberry Pi controleert, raden wij u sterk aan om een servo-hoed voor uw raspberry pi te krijgen.
hoe start ik een Servo?,
de beste manier om een servo van stroom te voorzien is met een batterij met een spanning binnen het spanningsbereik dat is opgegeven op de servo pagina ‘ s specs tabel. Zorg ervoor dat u een gezonde batterij gebruikt die meer dan genoeg stroom kan leveren. Omdat stroom wordt getrokken en niet geduwd, zal het hebben van meer stroom beschikbaar dan nodig is geen kwaad de servo (het is als het hebben van meer gas dan je nodig hebt om ergens in uw auto). De voeding voor de motor van de servo wordt geleverd op de rode draad., Het kan handig zijn om de rode draad door te knippen (of een X-Acto te gebruiken om de connector uit de behuizing te trekken) zodat u los van het signaal stroom kunt leveren. Dit zou u toelaten om uw ontvanger op een andere batterij dan uw servo als ze verschillende spanningen nodig hebben. Het zou u ook toestaan om de motor van uw servo direct van een batterij aan te drijven terwijl het signaal van een Arduino komt aangezien Arduino-spelden het soort stroom niet kunnen behandelen een servo behoeften (zij over het algemeen maximum uit bij 40mA).
hoe verzend ik een signaal over een lange afstand?,
soms kan bij het verzenden van een signaal over een lange afstand het signaal afbreken als gevolg van spanningsval en elektromagnetische interferentie (EMI). Een servo signaalversterker kan deze problemen oplossen en maakt het gemakkelijk om het signaal over een grote afstand van draad te verzenden.
hoe draai ik een Servo een bepaalde hoeveelheid (90°, 180°, continu, enz.)?
 bij bediening met een radiobesturingssysteem bieden de meeste hobby servo ‘ s 90° (45° in beide richtingen) rotatie direct uit de doos., Dit kan soms worden verhoogd als uw radiosysteem eindpuntaanpassingen biedt of uw servo controller een 180° jumper pin heeft. Als u Hitec digital servos gebruikt, wilt u gewoon de hand-held programmer aanschaffen om de rotatie te verhogen. Als u een Hitec of Futaba analoge servo hebt die slechts 90° rotatie biedt, kan de hoeveelheid rotatie soms worden verhoogd tot 180° door een eenvoudige wijziging uit te voeren.
bij bediening met een radiobesturingssysteem bieden de meeste hobby servo ‘ s 90° (45° in beide richtingen) rotatie direct uit de doos., Dit kan soms worden verhoogd als uw radiosysteem eindpuntaanpassingen biedt of uw servo controller een 180° jumper pin heeft. Als u Hitec digital servos gebruikt, wilt u gewoon de hand-held programmer aanschaffen om de rotatie te verhogen. Als u een Hitec of Futaba analoge servo hebt die slechts 90° rotatie biedt, kan de hoeveelheid rotatie soms worden verhoogd tot 180° door een eenvoudige wijziging uit te voeren.
Opmerking: U kunt Hitec-servo ’s bij ons kopen die vooraf zijn aangepast in onze eigen productiefaciliteit op de afzonderlijke Hitec-servo-pagina’ s., Deze wijziging vervalt alle ServoCity en Hitec garanties.
Hoe vervang ik een Servomotorset?
Hoe wordt de Servosnelheid gemeten?
Hoe wordt het Servomoment gemeten?
Wat is de” richting ” van een Servo waarnaar wordt verwezen?
alle servos draaien met de klok mee en tegen de klok in. De draairichting van de servo is afhankelijk van het signaal dat de servo ontvangt. Niet alle servo ‘ s komen overeen met betrekking tot de draairichting direct uit de doos., Als u een Hitec servo aansluit op uw radiobedieningsontvanger of servo controller en u vertelt de servo om naar rechts te draaien (met de klok mee), zal het naar rechts bewegen. Als je een Futaba servo aansluit op dezelfde ontvanger of servo controller en hem vertelt in dezelfde richting te gaan als de Hitec servo deed, zal hij de tegenovergestelde richting bewegen (tegen de klok in). Dit is een eenvoudige oplossing voor de meeste radiobesturingssystemen omdat ze een servo-omkeerfunctie hebben op de zender., Dit verschil tussen fabrikanten is de reden dat elke servo een specificatie zal hebben die de richting oproept die de servo met een toenemend PWM-signaal zal bewegen.
Wat is een Servo Spline?
de getande uitgaande as van een servo wordt in het algemeen aangeduid als een servo spline. Voor een overzicht van alle verschillende soorten servo splines op de servo ‘ s die we verkopen, kijk dan op de servo Spline vermelding in onze woordenlijst.