inhoudsopgave
besturingssysteem
besturingssystemen spelen een vitale rol in ons dagelijks leven. Het idee van een Automatisch besturingssysteem is fundamenteel en goed gemengd in elk facet van ons leven. Het automatische besturingssysteem speelt een belangrijke rol in de vooruitgang en verbetering van technische vaardigheden.,
een systeem is een combinatie van apparaten en componenten die door een of andere vorm van regelmatige interacties met elkaar verbonden zijn om samen te werken en een bepaald doel te bereiken. Het systeem kan fysiek, biologisch, Economisch en dergelijke zijn.
De term controle betekent reguleren, sturen of bevelen. Een besturingssysteem kan dus worden gedefinieerd als een combinatie van apparaten en onderdelen die zijn verbonden of daarmee verband houden om zichzelf of een ander systeem te besturen, te sturen of te regelen.,
besturingssystemen worden gebruikt in vele toepassingen, bijvoorbeeld de regeling van temperatuur, vloeistofniveau, positie, snelheid, debiet, druk, versnelling, enz.
Kenmerken van een besturingssysteem
het belangrijkste kenmerk van een besturingssysteem is dat er een duidelijk wiskundig verband moet bestaan tussen input en output van het systeem. Wanneer de relatie tussen input en output van het systeem kan worden weergegeven door een lineaire proportionaliteit, wordt het systeem een lineair regelsysteem genoemd., Wanneer de relatie tussen input en output niet kan worden weergegeven door één lineaire proportionaliteit, maar de input en output worden gerelateerd door een niet-lineaire relatie, wordt het systeem aangeduid als een niet-lineair regelsysteem.
eisen van een goed controlesysteem
nauwkeurigheid: nauwkeurigheid is de meettolerantie van het instrument en bepaalt de grenzen van de fouten die worden gemaakt wanneer het instrument onder normale bedrijfsomstandigheden wordt gebruikt. De nauwkeurigheid kan worden verbeterd door feedback-elementen te gebruiken., Om de nauwkeurigheid van een besturingssysteem foutdetector moet aanwezig zijn in het besturingssysteem.
gevoeligheid: de parameters van een regelsysteem veranderen altijd met de verandering van de omgevingsomstandigheden, inwendige storingen of andere parameters. Deze verandering kan worden uitgedrukt in termen van gevoeligheid. Elk regelsysteem moet ongevoelig zijn voor dergelijke parameters, maar alleen gevoelig zijn voor ingangssignalen.
ruis: een ongewenst ingangssignaal wordt ruis genoemd. Een goed besturingssysteem moet het geluidseffect kunnen verminderen voor betere prestaties.,
stabiliteit: Het is een belangrijk kenmerk van het besturingssysteem. Voor het begrensde ingangssignaal moet de uitgang Begrensd zijn en als de ingang nul is dan moet de uitgang nul zijn dan is zo ‘ n besturingssysteem een stabiel systeem.
bandbreedte: een werkend frequentiebereik bepaalt de bandbreedte van het besturingssysteem. De bandbreedte moet zo groot mogelijk zijn voor de frequentierespons van het goede besturingssysteem.
snelheid: het is de tijd die het besturingssysteem nodig heeft om zijn stabiele output te bereiken. Een goed besturingssysteem bezit hoge snelheid., De tijdelijke periode voor een dergelijk systeem is zeer klein.
oscillatie: een klein aantal oscillatie of constante oscillatie van de output geeft meestal aan dat het systeem stabiel is.
basiscomponenten van een besturingssysteem
de basiscomponenten van een besturingssysteem kunnen worden weergegeven door:
- referentie-invoerelement dat het opdrachtsignaal veroorzaakt;
- feedbackelement dat het feedbacksignaal produceert;
- foutdetector;
- controller;
- gecontroleerd systeem; en
- het uitgangssignaal, dat wil zeggen de gecontroleerde uitgang.,
deze componenten zijn weergegeven in de vorm van een systeemblokdiagram zoals in onderstaande figuur en worden als volgt beschreven.
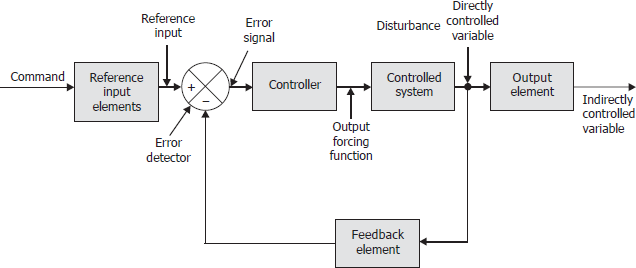
- referentie-invoerelementen: deze vormen de positie van het feedbackbesturingssysteem dat de relatie tussen de opdracht en bepaalde referentie-invoer vaststelt.,
- Command: Command is een opzettelijk ingevoerd signaal dat op een of andere manier wordt vastgesteld, extern aan en onafhankelijk van het feedbackbesturingssysteem in kwestie.
- referentie-Ingang: Het is een signaal dat als vergelijkingsstandaard voor een feedbackbesturingssysteem is vastgesteld op grond van zijn relatie tot het commando.
- foutdetector: het is een element waarin een systeemvariabele (feedbacksignaal) van een andere variabele (Referentiesignaal) wordt afgetrokken om de derde variabele (foutsignaal) te verkrijgen. Het wordt ook wel een comparator genoemd.,
- Feedbackelement: feedbacksignaal is een functie van de gecontroleerde uitgang die wordt vergeleken met het referentiesignaal om het activeringssignaal te verkrijgen.
- foutsignaal: het is een algebraïsche som van de referentie-invoer en de primaire terugkoppeling.
- Controller: de controller is een element dat nodig is om het juiste besturingssignaal te genereren.
- uitgang Forcing functie: het is de voorwaarde die wordt gevarieerd als een functie van het bedieningssignaal om de waarde van de gecontroleerde variabele te veranderen.,
- gecontroleerd systeem: het is een lichaam, proces of machine waarvan een bepaalde toestand moet worden geregeld, bijvoorbeeld een ruimtevaartuig, reactor, ketel, CNC-machine, enz.
- gecontroleerde variabele: het is een variabele die direct wordt gemeten en gecontroleerd. De storing is invoer anders dan een commando dat de waarde van de gecontroleerde variabele neigt te beïnvloeden.
- Outputelementen: dit zijn de elementen die de relatie tussen de direct gecontroleerde variabele en de indirect gecontroleerde variabele bepalen.,
classificatie van besturingssysteem
Open-Loop besturingssysteem
een besturingssysteem dat zich niet aan de veranderingen kan aanpassen, wordt een open-loop besturingssysteem genoemd. In het algemeen zijn handmatige Besturingssystemen open-loop systemen. Het blokdiagram van het open-lus regelsysteem is weergegeven in de onderstaande figuur.,

Hier is r(t) het ingangssignaal, u(t) het besturingssignaal/bedieningssignaal en c(t) is het uitgangssignaal.
in dit systeem blijft de uitvoer onveranderd voor constante invoer. In geval van discrepantie moet de invoer handmatig worden gewijzigd door een operator., Een open-lusregeling is geschikt wanneer er tolerantie is voor fluctuaties in het systeem en wanneer de systeemparametervariatie ongeacht de omgevingsomstandigheden kan worden verwerkt.
voordelen van Open-loop systeem
- deze systemen zijn eenvoudig in constructie en ontwerp.
- de open-lussystemen zijn economisch.
- deze systemen zijn gemakkelijk uit het oogpunt van onderhoud.
- gewoonlijk hebben deze systemen niet veel last van stabiliteitsproblemen.
- deze systemen zijn handig om te gebruiken wanneer uitvoer moeilijk te meten is.,
nadelen
- deze systemen zijn niet nauwkeurig en betrouwbaar omdat hun nauwkeurigheid afhankelijk is van de nauwkeurigheid van de kalibratie.
- in deze systemen worden onnauwkeurige resultaten verkregen met parametervariaties, d.w.z. interne storingen.
- herkalibratie van de regelaar is van tijd tot tijd vereist om de kwaliteit en nauwkeurigheid te handhaven.
Closed-Loop Control System
elk systeem dat zelf op de wijzigingen kan reageren en correcties kan aanbrengen, wordt een closed-loop control system genoemd., Het enige verschil tussen open-loop en closed-loop systemen is de feedback actie. Het blokschema van een gesloten regelsysteem is weergegeven in de onderstaande figuur.
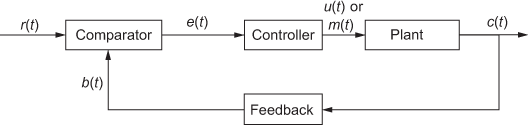
Hier wordt de uitvoer van de machine teruggekoppeld naar een comparator (foutdetector). Het uitgangssignaal wordt vergeleken met de referentie-ingang r(t) en het foutsignaal e(t) wordt naar de controller gestuurd., Op basis van de fout past de controller de invoer van de airconditioner aan . Dit proces wordt voortgezet totdat de fout wordt vernietigd. Zowel handmatige als automatische controles kunnen worden geïmplementeerd in een gesloten-lussysteem. De algemene winst van een systeem wordt verminderd door de aanwezigheid van feedback. Om de vermindering van de gain te compenseren, kan het systeem soms onstabiel worden als een versterker wordt geïntroduceerd om de gain van een systeem te verhogen.
voordelen van close-loop systeem
- in deze systemen is de nauwkeurigheid zeer hoog als gevolg van de correctie van eventuele fouten.,
- omdat deze systemen zowel omgevingsveranderingen als interne storingen waarnemen, wordt de fout gewijzigd.
- Er is een verminderd effect van niet-lineariteit in deze systemen.
- deze systemen hebben een hoge bandbreedte, d.w.z. een zone met een hoge bedrijfsfrequentie.
- Er zijn automatiseringsfaciliteiten in deze systemen.
nadelen
- De systemen zijn ingewikkeld in ontwerp.
- de close-loop systemen zijn duurder.
- deze systemen kunnen instabiel zijn.,
enkele voorbeelden van open-loop-en closed-loop-regelsystemen zijn als volgt:
- Verkeerslichtsystemen variëren in werking. Sommige systemen zijn gesloten-loop en sommige zijn open – loop. Bij het type open-loop is er een tijdmechanisme dat is ingesteld om de lichten op regelmatige tijdstippen te schakelen, ongeacht het volume van het verkeer. In het gesloten-lus type wordt echter de hoeveelheid verkeer die door de knooppunten gaat (elektronisch of anderszins) gecontroleerd en de duur van de “rode” en “groene” voorwaarden worden aangepast voor elk deel van het knooppunt dienovereenkomstig.,
- een voorbeeld van de werking van een open-loop systeem is een auto-wasmachine waarin alle auto ‘ s dezelfde hoeveelheid was ontvangen, ongeacht hoe vuil ze zijn. Hier is de output de netheid van de auto ‘ s, die overeenkomt met een bepaalde instelling van de machine (hoeveelheid water en wastijd). Een mens die echter auto ’s wast, zorgt er automatisch voor dat de vuilere auto’ s meer aandacht krijgen dan anderen. Autowassen door een verantwoordelijk mens is daarom een gesloten systeem. Een gewone wasmachine is een open-loop systeem.,
- een koelkast is een gesloten systeem. De temperatuur wordt gemeten door een thermostaat die de motor inschakelt wanneer de temperatuur boven de gewenste waarde stijgt en de motor uitschakelt wanneer de temperatuur weer de gewenste waarde bereikt.
- de verlichting van een ruimte is een open-loop systeem. Zodra het licht is ingeschakeld, blijft het branden (totdat het is uitgeschakeld ) ongeacht of de ruimte donker of licht is.
verschillen tussen de open-loop en closed-loop systemen
| S.,Geen. | Open-loop systeem | Closed-loop systeem |
| 1 | het feedbackelement is afwezig. | het feedback-element is altijd aanwezig. |
| 2 | er is geen foutdetector aanwezig. | er is altijd een foutdetector aanwezig. |
| 3 | een open-loop systeem is over het algemeen stabiel. | het closed-loop systeem kan onder bepaalde omstandigheden instabiel worden. |
| 4 | zij kunnen worden beïnvloed door niet-lineariteiten in het systeem. | zij kunnen de effecten van niet-lineariteiten in het systeem aanpassen., |
| 5 | het is eenvoudig te construeren. | het heeft een gecompliceerde constructie. |
| 6 | het is economisch. | het is kostbaar. |
| 7 | het heeft een kleine bandbreedte. | het heeft een grote bandbreedte. |
| 8 | ze zijn over het algemeen onnauwkeurig. | ze zijn accuraat. |
| 9 | het heeft minder onderhoud. | het heeft meer onderhoud. |
| 10 | het is onbetrouwbaar. | het is betrouwbaar., |
| 11 | Examples: Washing machine, fixed time traffic control system, room heater, etc | Examples: Servomotor control, generator output voltage control system, refrigerator, biological system, etc. |
Other Types of Control Systems
Linear and Non-linear
A linear system is one that obeys the principle of superposition., Het principe van superpositie stelt dat de reactie die ontstaat door de gelijktijdige toepassing van twee verschillende forceerfuncties gelijk is aan de som van individuele reacties.
niet-lineaire systemen gehoorzamen niet aan het principe van superpositie. Bijna alle praktische systemen zijn tot op zekere hoogte niet-lineair. Niet-lineariteiten worden geïntroduceerd als gevolg van verzadigingseffect van systeemcomponenten, wrijvingskrachten, spel tussen tandwieltreinen, mechanische verbindingen, niet-lineariteiten van elektronische componenten zoals eindversterkers, transistors, enz., gebruikt., De besturing van lineaire systemen is eenvoudig in vergelijking met de besturing van niet-lineaire systemen.
tijdinvariant en tijdinvariant
het tijdinvariant regelsysteem is een systeem waarvan de parameters NIET met de tijd variëren. De reactie van een dergelijk systeem is onafhankelijk van het tijdstip waarop input wordt toegepast. Bijvoorbeeld, weerstand, inductantie, en capaciteit van een elektrisch netwerk zijn onafhankelijk van de tijd.
een systeem waarin een of meer parameters variëren met de tijd. De respons is afhankelijk van het tijdstip waarop de input wordt toegepast., Een ruimtemeetbesturingssysteem waarbij de massa met de tijd afneemt, omdat de brandstof die het vervoert tijdens de vlucht wordt verbruikt, is een voorbeeld van een systeem waarbij de tijd varieert.
continu-tijd en Discrete
In continue besturingssystemen zijn alle systeemparameters een functie van continu-tijd, t. een discrete-tijdregeling omvat één of meer variabelen die alleen op discrete momenten van de tijd bekend zijn.
een continu-tijd of continue data is er een waarin de signalen op verschillende delen van het systeem continue functies van de tijd zijn. Deze signalen zijn continue signalen., Bijvoorbeeld, als we kijken naar de snelheidsregeling van een d.c. motor, we weten dat de uitgang, dat wil zeggen, de rotatie in termen van radialen per seconde is een functie van spanning en stroom die als input voor het op een continue-tijd basis. Een dergelijk systeem neemt een continu-tijd input en levert een continu-tijd output.
single–Input-Single-Output (SISO) en Multi–Input-Multi-Output (MIMO)
een systeem met één ingang en één uitgang wordt een single–input-single-output besturingssysteem genoemd. Met andere woorden, er is slechts één commando en één gecontroleerde uitvoer.,
een systeem met meerdere ingangen en meerdere uitgangen wordt een multi-input–multi-output besturingssysteem genoemd. Bijvoorbeeld, Boilertrommel niveau controle, robot arm controle, enz. De robotarm voert meerdere functies uit met meerdere ingangen. Deze meerdere functies worden de graad van vrijheid genoemd.
samengevoegde Parameter en gedistribueerde Parameter
regelsystemen die kunnen worden beschreven met gewone differentiaalvergelijkingen zijn samengevoegde parameterregelsystemen, terwijl gedistribueerde parameterregelsystemen worden beschreven met partiële differentiaalvergelijkingen., De parameters van een lange transmissielijn, dat wil zeggen de weerstand, inductantie en capaciteit, worden over de lijn verdeeld, maar zij kunnen op bepaalde punten als samengevoegde parameters worden beschouwd.
deterministisch en stochastisch
een controlesysteem is deterministisch als de respons voorspelbaar en herhaalbaar is. Zo niet, is het controlesysteem een stochastisch controlesysteem dat willekeurige variabele parameters omvat.,
statische en dynamische systemen
een systeem wordt dynamisch of tijdsafhankelijk genoemd als de huidige output afhangt van input uit het verleden, terwijl een statisch systeem het systeem is waarvan de huidige output alleen afhankelijk is van de huidige input.