
- Che cosa è un servo?
- Come posso controllare un servo?
- Come posso controllare un servo da un Arduino?
- Come posso controllare un servo da un Pi Raspbery?
- Come posso alimentare un servo?
- Come faccio a inviare un segnale su una lunga distanza?
- Come faccio a ruotare un servo una quantità specifica (90°, 180°, continuo, ecc)?
- Come posso sostituire un Servo Gear Set?
- Come viene misurata la velocità del servo?
- Come viene misurata la coppia servo?
- A cosa si riferisce la” Direzione ” di un servo?
- Che cosa è un servo Spline?,
Che cosa è un servo?
Come posso controllare un servo?
A differenza dei motori CC spazzolati, i servi non possono essere eseguiti semplicemente applicando una tensione. Oltre a fornire tensione di alimentazione (sul filo rosso) per il motore a tirare da, un segnale specifico chiamato un segnale PWM deve essere inviato sul filo del segnale (di solito giallo o bianco). Questo segnale può provenire da una varietà di fonti come servo controller, ricevitori RC o Arduino.
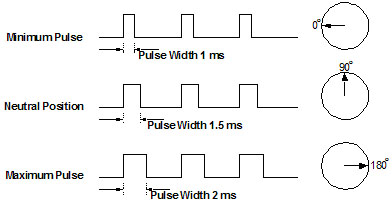
 I servi sono controllati inviando loro un impulso di larghezza variabile. Il cavo di controllo viene utilizzato per inviare questo impulso., I parametri per questo impulso sono che ha un impulso minimo, un impulso massimo e una frequenza di ripetizione. Dati i vincoli di rotazione del servo, neutro è definito per essere la posizione in cui il servo ha esattamente la stessa quantità di rotazione potenziale in senso orario come fa in senso antiorario. È importante notare che diversi servi avranno vincoli diversi sulla loro rotazione, ma hanno tutti una posizione neutra e quella posizione è sempre di circa 1,5 millisecondi (ms).,
I servi sono controllati inviando loro un impulso di larghezza variabile. Il cavo di controllo viene utilizzato per inviare questo impulso., I parametri per questo impulso sono che ha un impulso minimo, un impulso massimo e una frequenza di ripetizione. Dati i vincoli di rotazione del servo, neutro è definito per essere la posizione in cui il servo ha esattamente la stessa quantità di rotazione potenziale in senso orario come fa in senso antiorario. È importante notare che diversi servi avranno vincoli diversi sulla loro rotazione, ma hanno tutti una posizione neutra e quella posizione è sempre di circa 1,5 millisecondi (ms).,

L’angolo è determinato dalla durata di un impulso applicato al cavo di controllo. Questo è chiamato Pulse width Modulation. Il servo si aspetta di vedere un impulso ogni 20 ms. La lunghezza dell’impulso determinerà fino a che punto gira il motore. Ad esempio, un impulso di 1,5 ms farà girare il motore alla posizione di 90 gradi (posizione neutra).
Quando a questi servi viene comandato di muoversi, si sposteranno nella posizione e manterranno quella posizione., Se una forza esterna spinge contro il servo mentre il servo è in possesso di una posizione, il servo resisterà di muoversi da quella posizione. La quantità massima di forza che il servo può esercitare è la coppia nominale del servo. I servi non manterranno la loro posizione per sempre; l’impulso di posizione deve essere ripetuto per istruire il servo a rimanere in posizione.
Quando un impulso viene inviato ad un servo che è inferiore a 1.5 ms il servo ruota in una posizione e tiene il suo albero di uscita un certo numero di gradi in senso antiorario dal punto neutro. Quando l’impulso è più largo di 1,5 ms si verifica il contrario., La larghezza minima e la larghezza massima dell’impulso che comanderà al servo di girare in una posizione valida sono funzioni di ciascun servo. Marche diverse, e anche diversi servi della stessa marca, avranno diversi massimi e minimi. Generalmente l’impulso minimo sarà di circa 1 ms di larghezza e l’impulso massimo sarà di 2 ms di larghezza.
Un altro parametro che varia da servo a servo è la velocità di rotazione. Questo è il tempo necessario al servo per passare da una posizione all’altra., Il tempo di rotazione del caso peggiore è quando il servo tiene alla rotazione minima e viene comandato di andare alla rotazione massima. Questo può richiedere diversi secondi su servi di coppia molto elevata.
Lo scopo di queste informazioni è quello di dare una panoramica di come i servi funzionano e come comunicare con loro. Anche se abbiamo preso misure per assicurare la qualità delle informazioni qui, ServoCity non fornisce garanzie circa le informazioni presentate. ServoCity non può essere ritenuta responsabile per qualsiasi uso o abuso delle informazioni fornite., Se avete domande su queste informazioni si prega di e-mail [email protected].
Come posso controllare un servo da un Arduino?
Come posso controllare un servo da un Raspberry Pi?
Mentre Raspberry Pis può emettere un segnale PWM, spesso non sono in grado di mantenere un segnale pulito a causa della mancanza di un timer dedicato. Se si sta controllando servi da un Raspberry Pi si consiglia vivamente di ottenere un cappello servo per il vostro raspberry pi.
Come posso alimentare un servo?,
Il modo migliore per alimentare un servo è con una batteria con una tensione entro l’intervallo di tensione specificato nella tabella delle specifiche delle pagine servo. Assicurarsi di utilizzare una batteria sana che può fornire più che sufficiente corrente. Poiché la corrente viene tirata e non spinta, avere più corrente disponibile di quella necessaria non danneggerà il servo (è come avere più gas del necessario per arrivare da qualche parte nella tua auto). L’alimentazione per il motore del servo viene fornita sul filo rosso., Può essere utile tagliare il filo rosso (o utilizzare un X-Acto per estrarre il connettore dall’alloggiamento) in modo da poter alimentare separatamente dal segnale. Ciò consentirebbe di alimentare il ricevitore su una batteria diversa rispetto al servo se hanno bisogno di tensioni diverse. Inoltre, ti permetterebbe di alimentare il motore del tuo servo direttamente da una batteria mentre il segnale proviene da un Arduino poiché i pin Arduino non possono gestire il tipo di corrente di cui un servo ha bisogno (generalmente max out a 40mA).
Come faccio a inviare un segnale su una lunga distanza?,
A volte quando si invia un segnale su una lunga distanza, il segnale può degradarsi a causa di caduta di tensione e interferenze elettromagnetiche (EMI). Un servo ripetitore del segnale in grado di risolvere questi problemi e rendere più facile per trasmettere il segnale su una grande distanza di filo.
Come faccio a ruotare un servo di una quantità specifica (90°, 180°, continuo, ecc)?
 Quando controllato con un sistema di controllo radio, la maggior parte dei servi hobby offrono 90° (45° in entrambe le direzioni) rotazione a destra, fuori dalla scatola., Questo a volte può essere aumentato se il sistema radio offre regolazioni del punto finale o il servocomando ha un pin jumper di 180°. Se si utilizzano servi digitali Hitec, si desidera semplicemente acquistare il programmatore portatile per aumentare la rotazione. Se si dispone di un servo analogico Hitec o Futaba che offre solo 90 ° di rotazione, la quantità di rotazione può talvolta essere aumentata a 180° eseguendo una semplice modifica.
Quando controllato con un sistema di controllo radio, la maggior parte dei servi hobby offrono 90° (45° in entrambe le direzioni) rotazione a destra, fuori dalla scatola., Questo a volte può essere aumentato se il sistema radio offre regolazioni del punto finale o il servocomando ha un pin jumper di 180°. Se si utilizzano servi digitali Hitec, si desidera semplicemente acquistare il programmatore portatile per aumentare la rotazione. Se si dispone di un servo analogico Hitec o Futaba che offre solo 90 ° di rotazione, la quantità di rotazione può talvolta essere aumentata a 180° eseguendo una semplice modifica.
Nota: È possibile acquistare servi Hitec da noi che sono pre-modificati nel nostro impianto di produzione sulle singole pagine Hitec servo., Questa modifica annulla tutte le garanzie ServoCity e Hitec.
Come posso sostituire un Servo Gear Set?
Come viene misurata la velocità del servo?
Come viene misurata la coppia del servo?
A cosa si riferisce la” Direzione ” di un servo?
Tutti i servi ruoteranno in senso orario e antiorario. La direzione che il servo ruota tutto dipende dal segnale che il servo sta ricevendo. Non tutti i servi corrispondono per quanto riguarda la direzione di rotazione a destra, fuori dalla scatola., Se si collega un servo Hitec al ricevitore di controllo radio o al servo controller e si dice al servo di girare a destra (in senso orario), si sposterà a destra. Se poi si collega un servo Futaba nello stesso ricevitore o servo controller e dire di andare nella stessa direzione come il servo Hitec ha fatto, si muoverà nella direzione opposta (in senso antiorario). Questa è una soluzione facile con la maggior parte dei sistemi di controllo radio poiché hanno una funzione di inversione del servo sul trasmettitore., Questa differenza tra i produttori è la ragione per cui ogni servo avrà una specifica che chiama la direzione in cui il servo si muoverà con un segnale PWM crescente.
Che cosa è un servo Spline?
L’albero di uscita dentato di un servo è generalmente indicato come una spline servo. Per una ripartizione di tutti i diversi tipi di servo spline sui servi che vendiamo, controllare la voce Servo Spline nel nostro glossario.