Sommario
Sistema di controllo
I sistemi di controllo svolgono un ruolo fondamentale nella nostra vita quotidiana. La nozione di un sistema di controllo automatico è fondamentale e ben miscelata in ogni aspetto della nostra vita. Il sistema di controllo automatico svolge un ruolo importante nell’avanzamento e nel miglioramento delle capacità ingegneristiche.,
Un sistema è una combinazione di dispositivi e componenti collegati tra loro da una qualche forma di interazioni regolari per agire insieme ed eseguire un determinato obiettivo. Il sistema può essere fisico, biologico, economico e simili.
Il termine controllo significa regolare, dirigere o comandare. Pertanto, un sistema di controllo può essere definito come una combinazione di dispositivi e componenti collegati o correlati in modo da comandare, dirigere o regolare se stesso o un altro sistema.,
I sistemi di controllo sono utilizzati in molte applicazioni, ad esempio il controllo di temperatura, livello del liquido, posizione, velocità, flusso, pressione, accelerazione, ecc.
Caratteristiche di un sistema di controllo
La caratteristica principale di un sistema di controllo è che dovrebbe esserci una chiara relazione matematica tra input e output del sistema. Quando la relazione tra input e output del sistema può essere rappresentata da una proporzionalità lineare, il sistema è chiamato sistema di controllo lineare., Ancora una volta quando la relazione tra input e output non può essere rappresentata da una singola proporzionalità lineare, piuttosto l’input e l’output sono correlati da una relazione non lineare, il sistema viene definito un sistema di controllo non lineare.
Requisiti di un buon sistema di controllo
Precisione: La precisione è la tolleranza di misura dello strumento e definisce i limiti degli errori commessi quando lo strumento viene utilizzato in condizioni operative normali. La precisione può essere migliorata utilizzando elementi di feedback., Per aumentare la precisione di qualsiasi rilevatore di errori del sistema di controllo dovrebbe essere presente nel sistema di controllo.
Sensibilità: I parametri di un sistema di controllo cambiano continuamente con il cambiamento delle condizioni circostanti, disturbi interni o altri parametri. Questo cambiamento può essere espresso in termini di sensibilità. Qualsiasi sistema di controllo dovrebbe essere insensibile a tali parametri ma sensibile solo ai segnali di ingresso.
Rumore: un segnale di ingresso indesiderato è noto come rumore. Un buon sistema di controllo dovrebbe essere in grado di ridurre l’effetto rumore per prestazioni migliori.,
Stabilità: È una caratteristica importante del sistema di controllo. Per il segnale di ingresso limitato, l’uscita deve essere limitata e se l’ingresso è zero, l’uscita deve essere zero, quindi un tale sistema di controllo si dice che sia un sistema stabile.
Larghezza di banda: una gamma di frequenza operativa decide la larghezza di banda del sistema di controllo. La larghezza di banda dovrebbe essere il più grande possibile per la risposta in frequenza del buon sistema di controllo.
Velocità: è il tempo impiegato dal sistema di controllo per ottenere la sua uscita stabile. Un buon sistema di controllo possiede l’alta velocità., Il periodo transitorio per un tale sistema è molto piccolo.
Oscillazione: un piccolo numero di oscillazione o oscillazione costante dell’uscita tende a indicare che il sistema è stabile.
Componenti di Base di un Sistema di Controllo
I componenti di base di un sistema di controllo può essere rappresentato da:
- ingresso di riferimento di un elemento che è causa del segnale di comando;
- elemento di retroazione che produce il segnale di feedback;
- la rilevazione dell’errore;
- controller;
- sistema di controllo; e
- il segnale di uscita, che è, la controllata di uscita.,
Questi componenti sono mostrati sotto forma di schema a blocchi di sistema come nella figura seguente e sono descritti come segue.
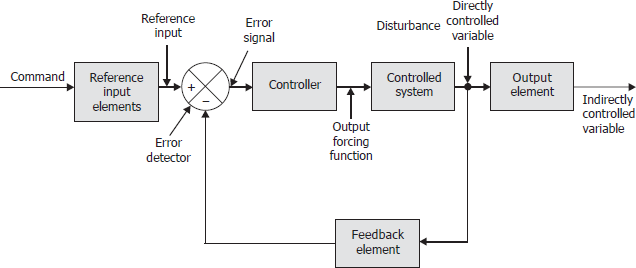
- Riferimento Elementi di Input: Questi costituiscono la posizione del sistema di controllo feedback che stabilisce la relazione tra il comando e riferimento certo input.,
- Comando: Il comando è un segnale deliberatamente introdotto stabilito con alcuni mezzi, esterno e indipendente dal sistema di controllo di retroazione in esame.
- Ingresso di riferimento: È un segnale stabilito come standard di confronto per un sistema di controllo di retroazione in virtù della sua relazione con il comando.
- Rivelatore di errore: è un elemento in cui una variabile di sistema (segnale di retroazione) viene sottratta da un’altra variabile (segnale di riferimento) per ottenere la terza variabile (segnale di errore). È anche chiamato un comparatore.,
- Elemento di feedback: il segnale di feedback è una funzione dell’uscita controllata che viene confrontata con il segnale di riferimento per ottenere il segnale di azionamento.
- Segnale di errore: è una somma algebrica dell’input di riferimento e del feedback primario.
- Controller: Il controller è un elemento che è necessario per generare il segnale di controllo appropriato.
- Funzione di forzatura dell’uscita: è la condizione che viene variata in funzione del segnale di azionamento in modo da modificare il valore della variabile controllata.,
- Sistema controllato: è un corpo, un processo o una macchina di cui deve essere controllata una particolare condizione, ad esempio un veicolo spaziale, un reattore, una caldaia, una macchina CNC, ecc.
- Variabile controllata: è una variabile direttamente misurata e controllata. Il disturbo è un input diverso da un comando che tende a influenzare il valore della variabile controllata.
- Elementi di output: Questi sono gli elementi che stabiliscono la relazione tra la variabile controllata direttamente e la variabile controllata indirettamente.,
Classificazione del sistema di controllo
Sistema di controllo ad anello aperto
Un sistema di controllo che non può adattarsi alle modifiche è chiamato sistema di controllo ad anello aperto. In generale, i sistemi di controllo manuale sono sistemi a ciclo aperto. Lo schema a blocchi del sistema di controllo ad anello aperto è mostrato nella figura seguente.,

Ecco, r(t) è il segnale di ingresso u(t) è il segnale di controllo/segnale di attivazione e c(t) è il segnale di uscita.
In questo sistema, l’uscita rimane inalterata per l’ingresso costante. In caso di discrepanza, l’input deve essere modificato manualmente da un operatore., Un sistema di controllo ad anello aperto è adatto quando c’è tolleranza per fluttuazione nel sistema e quando la variazione di parametro del sistema può essere gestita indipendentemente dalle condizioni ambientali.
Vantaggi del sistema ad anello aperto
- Questi sistemi sono semplici nella costruzione e nella progettazione.
- I sistemi a circuito aperto sono economici.
- Questi sistemi sono facili dal punto di vista della manutenzione.
- Di solito, questi sistemi non sono molto turbati da problemi di stabilità.
- Questi sistemi sono comodi da usare quando l’uscita è difficile da misurare.,
Svantaggi
- Questi sistemi non sono precisi e affidabili perché la loro precisione dipende dalla precisione della calibrazione.
- In questi sistemi, si ottengono risultati imprecisi con variazioni dei parametri, cioè disturbi interni.
- La ricalibrazione del controller è richiesta di volta in volta per mantenere la qualità e la precisione.
Sistema di controllo a circuito chiuso
Qualsiasi sistema in grado di rispondere alle modifiche e apportare correzioni da solo è noto come sistema di controllo a circuito chiuso., L’unica differenza tra i sistemi a ciclo aperto e a ciclo chiuso è l’azione di feedback. Lo schema a blocchi di un sistema di controllo a circuito chiuso è mostrato nella figura seguente.
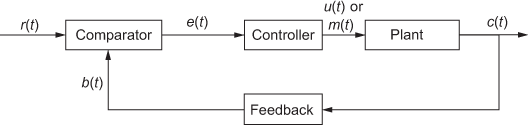
Qui, l’uscita della macchina è rinviato a confronto (la rilevazione dell’errore). Il segnale di uscita viene confrontato con l’ingresso di riferimento r(t) e il segnale di errore e(t) viene inviato al controller., In base all’errore, il controller regola l’ingresso del condizionatore d’aria . Questo processo viene continuato fino a quando l’errore viene annullato. Sia i controlli manuali che quelli automatici possono essere implementati in un sistema a circuito chiuso. Il guadagno complessivo di un sistema è ridotto a causa della presenza di feedback. Per compensare la riduzione del guadagno, se viene introdotto un amplificatore per aumentare il guadagno di un sistema, il sistema può talvolta diventare instabile.
Vantaggi del sistema ad anello chiuso
- In questi sistemi, la precisione è molto elevata a causa della correzione di qualsiasi errore derivante.,
- Poiché questi sistemi percepiscono il cambiamento dell’ambiente e i disturbi interni, l’errore viene modificato.
- C’è un effetto ridotto di non linearità in questi sistemi.
- Questi sistemi hanno un’elevata larghezza di banda, ovvero una zona di frequenza operativa elevata.
- Ci sono strutture di automazione in questi sistemi.
Svantaggi
- I sistemi sono complicati nella progettazione.
- I sistemi ad anello chiuso sono più costosi.
- Questi sistemi potrebbero essere instabili.,
Alcuni esempi di sistemi di controllo ad anello aperto e ad anello chiuso sono i seguenti:
- I sistemi semaforici variano nel funzionamento. Alcuni sistemi sono a ciclo chiuso e alcuni sono a ciclo aperto. Nel tipo ad anello aperto, c’è un meccanismo di temporizzazione che è impostato per commutare le luci a intervalli regolari, indipendentemente dal volume di traffico. Nel tipo a circuito chiuso, tuttavia, la quantità di traffico che passa attraverso le giunzioni viene monitorata (elettronicamente o in altro modo) e la durata delle condizioni “rosso” e “verde” viene regolata di conseguenza per ciascuna parte della giunzione.,
- Un esempio dell’azione di un sistema ad anello aperto è una macchina per l’autolavaggio in cui tutte le auto ricevono la stessa quantità di lavaggio indipendentemente da quanto siano sporche. Qui, l’output è la pulizia delle auto, che corrisponde a una determinata impostazione della macchina (quantità di acqua e tempo di lavaggio). Un essere umano, tuttavia, che lava le auto, si assicura automaticamente che le auto più sporche ricevano più attenzione di altre. Il lavaggio dell’auto da parte di un essere umano responsabile è, quindi, un sistema di controllo a circuito chiuso. Una normale lavatrice è un sistema a circuito aperto.,
- Un frigorifero è un sistema a circuito chiuso. La sua temperatura è misurata da un termostato che accende il motore quando la temperatura supera il valore desiderato e spegne il motore quando la temperatura raggiunge nuovamente il valore desiderato.
- L’illuminazione di una stanza è un sistema a circuito aperto. Una volta che la luce è accesa, rimarrà accesa (fino a quando non viene spenta ) indipendentemente dal fatto che la stanza sia scura o chiara.
Differenze tra i sistemi a ciclo aperto e a ciclo chiuso
| S.,No. | Sistema ad anello aperto | Sistema ad anello chiuso |
| 1 | L’elemento di retroazione è assente. | L’elemento di feedback sempre presente. |
| 2 | Non è presente un rilevatore di errori. | Un rilevatore di errori è sempre presente. |
| 3 | Un sistema ad anello aperto è generalmente stabile. | Il sistema a circuito chiuso può diventare instabile in determinate condizioni. |
| 4 | Possono essere influenzati da non linearità nel sistema. | Possono regolare gli effetti delle non linearità presenti nel sistema., |
| 5 | È facile da costruire. | Ha una costruzione complicata. |
| 6 | È economico. | È costoso. |
| 7 | Ha una larghezza di banda ridotta. | Ha una grande larghezza di banda. |
| 8 | Sono generalmente imprecisi. | Sono accurati. |
| 9 | Ha meno manutenzione. | Ha più manutenzione. |
| 10 | È inaffidabile. | È affidabile., |
| 11 | Examples: Washing machine, fixed time traffic control system, room heater, etc | Examples: Servomotor control, generator output voltage control system, refrigerator, biological system, etc. |
Other Types of Control Systems
Linear and Non-linear
A linear system is one that obeys the principle of superposition., Il principio di sovrapposizione afferma che la risposta prodotta dall’applicazione simultanea di due diverse funzioni di forzatura è uguale alla somma delle singole risposte.
I sistemi non lineari non obbediscono al principio di sovrapposizione. Quasi tutti i sistemi pratici non sono lineari in una certa misura. Le non linearità sono introdotte a causa dell’effetto di saturazione dei componenti del sistema, delle forze di attrito, del gioco tra i treni di ingranaggi, dei collegamenti meccanici, delle non linearità dei componenti elettronici come amplificatori di potenza, transistor, ecc., utilizzare., Il controllo dei sistemi lineari è facile rispetto al controllo dei sistemi non lineari.
Tempo-invariante e Tempo-variabile
Il sistema di controllo tempo-invariante è uno i cui parametri non variano con il tempo. La risposta di tale sistema è indipendente dal momento in cui viene applicato l’input. Ad esempio, resistenza, induttanza e capacità di una rete elettrica sono indipendenti dal tempo.
Un sistema variabile nel tempo è quello in cui uno o più parametri variano nel tempo. La risposta dipende dal momento in cui viene applicato l’input., Un sistema di controllo del veicolo spaziale in cui la massa diminuisce con il tempo, mentre il carburante che trasporta viene consumato durante il volo, è un esempio di un sistema che varia nel tempo.
Tempo continuo e Discreto
Nei sistemi di controllo continuo, tutti i parametri di sistema sono una funzione del tempo continuo, t. Un controllo a tempo discreto coinvolge una o più variabili note solo in istanti di tempo discreti.
Un tempo continuo o dati continui è quello in cui i segnali in varie parti del sistema sono funzioni continue del tempo. Questi segnali sono segnali a tempo continuo., Ad esempio, quando consideriamo il controllo della velocità di un motore dc, sappiamo che l’uscita, cioè la rotazione in termini di radianti al secondo, è una funzione di tensione e corrente fornita come input ad esso su una base a tempo continuo. Tale sistema richiede un ingresso a tempo continuo e fornisce un’uscita a tempo continuo.
Single-Input–Single-Output (SISO) e Multi-Input–Multi-Output (MIMO)
Un sistema con un ingresso e un’uscita è chiamato un sistema di controllo single-input–single-output. In altre parole, c’è solo un comando e un output controllato.,
Un sistema con più ingressi e più uscite è chiamato sistema di controllo multi-input–multi-output. Ad esempio, controllo del livello del tamburo della caldaia, controllo del braccio del robot, ecc. Il braccio del robot esegue molteplici funzioni con più ingressi. Queste molteplici funzioni sono chiamate il grado di libertà.
Parametro concentrato e parametro distribuito
I sistemi di controllo che possono essere descritti da equazioni differenziali ordinarie sono sistemi di controllo dei parametri concentrati mentre i sistemi di controllo dei parametri distribuiti sono descritti da equazioni differenziali alle derivate parziali., I parametri di una linea di trasmissione lunga, cioè la resistenza, l’induttanza e la capacità, sono distribuiti lungo la linea, ma possono essere considerati come parametri concentrati in determinati punti.
Deterministico e stocastico
Un sistema di controllo è deterministico se la risposta è prevedibile e ripetibile. In caso contrario, il sistema di controllo è un sistema di controllo stocastico che coinvolge parametri variabili casuali.,
Sistemi statici e dinamici
Un sistema è chiamato dinamico o dipendente dal tempo se la sua uscita attuale dipende dall’ingresso passato, mentre un sistema statico è quello la cui uscita corrente dipende solo dall’ingresso corrente.