
- mi a szervo?
- hogyan Vezérelhetek egy szervót?
- hogyan Vezérelhetek egy szervót egy Arduino-ból?
- hogyan Vezérelhetek egy szervót egy Raspbery Pi-ből?
- Hogyan tölthetek be egy szervót?
- Hogyan küldhetek jelet hosszú távon?
- hogyan forgathatok egy szervót egy adott mennyiségben (90°, 180°, folyamatos stb.)?
- hogyan cserélhetek ki egy szervo fogaskereket?
- hogyan mérik a szervo sebességét?
- hogyan mérik a szervo nyomatékot?
- mire utal a szervó” iránya”?
- mi a szervo Spline?,
mi a szervo?
hogyan Vezérelhetek egy szervót?
ellentétben a csiszolt egyenáramú motorokkal, a szervókat nem lehet egyszerűen feszültség alkalmazásával futtatni. Amellett, hogy tápfeszültséget biztosít (a piros huzalon) a motor húzásához, egy pwm jelnek nevezett speciális jelet kell küldeni a jelvezetékre (általában sárga vagy fehér). Ez a jel különböző forrásokból származhat, például szervo vezérlőkből, RC vevőkből vagy Arduinosokból.
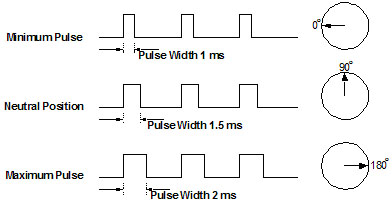
 A Szervókat változó szélességű impulzusok küldésével vezérlik. A vezérlővezetéket az impulzus küldésére használják., Ennek az impulzusnak a paraméterei az, hogy minimális impulzussal, maximális impulzussal, ismétlési sebességgel rendelkezik. Tekintettel a szervo forgási korlátaira, a semleges az a helyzet, ahol a szervónak pontosan ugyanolyan mennyiségű potenciális forgása van az óramutató járásával megegyező irányban, mint az óramutató járásával ellentétes irányban. Fontos megjegyezni, hogy a különböző szervóknak eltérő korlátaik vannak a forgásukra, de mindegyiknek semleges helyzete van, és ez a pozíció mindig 1,5 milliszekundum (ms) körül van.,
A Szervókat változó szélességű impulzusok küldésével vezérlik. A vezérlővezetéket az impulzus küldésére használják., Ennek az impulzusnak a paraméterei az, hogy minimális impulzussal, maximális impulzussal, ismétlési sebességgel rendelkezik. Tekintettel a szervo forgási korlátaira, a semleges az a helyzet, ahol a szervónak pontosan ugyanolyan mennyiségű potenciális forgása van az óramutató járásával megegyező irányban, mint az óramutató járásával ellentétes irányban. Fontos megjegyezni, hogy a különböző szervóknak eltérő korlátaik vannak a forgásukra, de mindegyiknek semleges helyzete van, és ez a pozíció mindig 1,5 milliszekundum (ms) körül van.,

a szöget a vezérlővezetékre alkalmazott impulzus időtartama határozza meg. Ezt impulzusszélesség-modulációnak nevezik. A szervo elvárja, hogy 20 ms-enként impulzust látjon.az impulzus hossza meghatározza, hogy a motor milyen messzire fordul. Például egy 1,5 ms-os impulzus a motort 90 fokos helyzetbe (semleges helyzetbe) fordítja.
ha ezek a szervók parancsot kapnak, hogy mozogjanak, akkor a pozícióba lépnek, és megtartják azt a pozíciót., Ha egy külső erő a szervóhoz nyomódik, miközben a szervo pozíciót tart, a szervo ellenáll a helyzetből való kilépésnek. A szervo által kifejtett erő maximális mennyisége a szervo nyomatékértékelése. A szervók azonban nem tartják örökké a helyzetüket; a pozícióimpulzust meg kell ismételni, hogy utasítsa a szervót, hogy maradjon a helyén.
amikor egy impulzust 1,5 ms-nál kisebb szervóra küldünk, a szervo olyan helyzetbe forog, hogy a kimeneti tengelyét a semleges ponttól néhány fokkal az óramutató járásával ellentétes irányban tartja. Ha az impulzus szélesebb, mint 1,5 ms, az ellenkezője történik., A minimális szélesség és az impulzus maximális szélessége, ami arra utasítja a szervót, hogy érvényes pozícióba forduljon, az egyes szervók funkciói. A különböző márkák, sőt ugyanazon márka különböző szervói is eltérő maximális és minimumok lesznek. Általában a minimális impulzus körülbelül 1 ms széles, a maximális impulzus pedig 2 ms széles lesz.
egy másik paraméter, amely szervótól szervóig változik, a fordulási sebesség. Ez az az idő, amely a szervótól az egyik pozícióból a másikba változik., A legrosszabb esetben fordulási idő az, amikor a szervo a minimális forgást tartja, és azt parancsolja, hogy menjen a maximális forgatáshoz. Ez néhány másodpercet vehet igénybe nagyon nagy nyomatékú szervókon.
ennek az információnak az a célja, hogy áttekintést adjon a szervók működéséről és a velük való kommunikációról. Bár lépéseket tettünk az információk minőségének biztosítása érdekében, a ServoCity nem garantálja a bemutatott információkat. A ServoCity nem vonható felelősségre vagy felelősségre a megadott információk bármilyen felhasználásáért vagy visszaéléséért., Ha kérdése van ezzel az információval kapcsolatban, kérjük, írjon e-mailt [email protected].
hogyan Vezérelhetek egy szervót egy Arduino-ból?
hogyan Vezérelhetek egy szervót egy Raspberry Pi-ből?
míg a Raspberry Pis képes PWM jelet kiadni, gyakran nem képesek tiszta jelet fenntartani a dedikált időzítő hiánya miatt. Ha a Raspberry Pi szervóit vezérli, javasoljuk, hogy szerezzen szervo kalapot a raspberry Pi számára.
hogyan Táplálhatok szervót?,
A szervo táplálásának legjobb módja egy olyan akkumulátor, amelynek feszültsége a szervo oldalak specifikációs táblázatában megadott feszültségtartományon belül van. Ügyeljen arra, hogy olyan egészséges akkumulátort használjon, amely több mint elegendő áramot képes biztosítani. Mivel az áramot húzzák és nem tolják, a szükségesnél több áram rendelkezésre áll, nem fogja bántani a szervót (olyan, mintha több gáz lenne, mint amennyit el kell jutnia valahova az autójába). A szervo motorjának teljesítménye a piros huzalon található., Hasznos lehet a piros huzal vágása (vagy egy X-Acto segítségével húzza ki a csatlakozót a házból), hogy a jelet külön-külön táplálhassa. Ez lehetővé tenné, hogy a Vevőt más akkumulátorra táplálja, mint a szervo, ha különböző feszültségekre van szükségük. Azt is lehetővé tenné, hogy a szervo motorját közvetlenül az akkumulátorról táplálja, miközben a jel Arduino-ból származik, mivel az Arduino csapok nem tudják kezelni a szervo igényeinek megfelelő áramot (általában 40mA-nál max.).
Hogyan küldhetek jelet hosszú távon?,
néha, amikor egy jelet nagy távolságra küldünk, a jel a feszültségesés és az elektromágneses interferencia (EMI) miatt lebomolhat. A szervo jel emlékeztető képes megoldani ezeket a problémákat, hogy könnyen továbbítja a jelet egy nagy távolság a vezeték.
hogyan forgathatok egy szervót egy adott összeggel (90°, 180°, folyamatos stb.)?
 rádióvezérlő rendszerrel vezérelve a legtöbb hobbi szervó 90° (45° mindkét irányban) forgást kínál a dobozból., Ez néha növelhető, ha a rádiós rendszer végpont-beállításokat kínál, vagy a szervo vezérlő 180° – os jumper tűvel rendelkezik. Ha Hitec digital servos-t használ, egyszerűen meg akarja vásárolni a kézi programozót a forgatás növelése érdekében. Ha van egy Hitec vagy Futaba analóg szervo, amely csak 90° – os forgást kínál, a forgatás mennyiségét néha 180° – ra lehet növelni egy egyszerű módosítás végrehajtásával.
rádióvezérlő rendszerrel vezérelve a legtöbb hobbi szervó 90° (45° mindkét irányban) forgást kínál a dobozból., Ez néha növelhető, ha a rádiós rendszer végpont-beállításokat kínál, vagy a szervo vezérlő 180° – os jumper tűvel rendelkezik. Ha Hitec digital servos-t használ, egyszerűen meg akarja vásárolni a kézi programozót a forgatás növelése érdekében. Ha van egy Hitec vagy Futaba analóg szervo, amely csak 90° – os forgást kínál, a forgatás mennyiségét néha 180° – ra lehet növelni egy egyszerű módosítás végrehajtásával.
Megjegyzés: megvásárolhatja tőlünk a Hitec szervókat, amelyeket saját gyártóüzemünkben előre módosítottunk az egyes Hitec szervo oldalakon., Ez a módosítás érvényteleníti az összes ServoCity és Hitec garanciát.
hogyan cserélhetek ki egy szervo sebességváltót?
hogyan mérik a szervo sebességét?
hogyan mérik a szervo nyomatékot?
mire utal egy szervó” iránya”?
minden szervó az óramutató járásával megegyező irányban és az óramutató járásával ellentétes irányban forog. Az irány a szervo forog minden attól függ, hogy a jel a szervo fogadása. Nem minden szervó felel meg a forgásiránynak a dobozból., Ha egy Hitec szervót csatlakoztat a rádióvezérlő vevőkészülékéhez vagy szervo vezérlőjéhez, és azt mondja a szervónak, hogy forduljon jobbra (az óramutató járásával megegyező irányba), akkor jobbra mozog. Ha ezután egy Futaba szervót csatlakoztat ugyanabba a vevőbe vagy szervo vezérlőbe, és azt mondja, hogy ugyanabba az irányba menjen, mint a Hitec szervo, akkor az ellenkező irányba mozog (az óramutató járásával ellentétes irányba). Ez egy egyszerű javítás a legtöbb rádióvezérlő rendszerrel, mivel szervo hátrameneti
funkcióval rendelkezik az adón., Ez a különbség a gyártók között az oka annak, hogy minden szervónak van egy specifikációja, amely felhívja a szervo irányát növekvő PWM jellel.
mi a szervo Spline?
A szervo fogazott kimeneti tengelyét általában a szervo spline-nek nevezik. Az általunk forgalmazott szervókon található különféle szervo splinek lebontásához nézze meg a szervo Spline bejegyzést a szószedetünkben.