a PID vezérlő mögött álló alapötlet egy érzékelő olvasása, majd a kívánt működtető kimenet kiszámítása arányos, integrált és származékos válaszok kiszámításával, valamint e három komponens összegzésével a kimenet kiszámításához. Mielőtt elkezdenénk meghatározni egy PID vezérlő paramétereit, látni fogjuk, mi az a zárt hurkú rendszer és néhány terminológia, ami ehhez kapcsolódik.,
zárt hurkú rendszer
egy tipikus vezérlőrendszerben a folyamatváltozó a szabályozandó rendszerparaméter, például hőmérséklet (ºC), Nyomás (psi) vagy áramlási sebesség (liter/perc). A folyamatváltozó mérésére egy érzékelő szolgál, amely visszajelzést ad a vezérlőrendszernek. A beállított pont a folyamatváltozó kívánt vagy parancsértéke, például hőmérséklet-szabályozó rendszer esetén 100 Celsius fok., Egy adott pillanatban a folyamatváltozó és a beállított pont közötti különbséget a vezérlőrendszer algoritmusa (kompenzátor) használja, hogy meghatározza a rendszer (üzem) meghajtásához szükséges működtető kimenetet. Például, ha a mért hőmérsékleti folyamatváltozó 100 ºC, a kívánt hőmérséklet-beállítási pont 120 ºC, akkor a vezérlő algoritmus által meghatározott működtető kimenet lehet egy fűtőberendezés meghajtása. A fűtőtest bekapcsolásához egy működtetőt vezetve a rendszer melegebbé válik, ami a hőmérsékleti folyamat változójának növekedését eredményezi., Ezt zárt hurkú vezérlőrendszernek nevezik, mivel az állandó visszacsatolást biztosító érzékelők leolvasásának és a kívánt működtető kimenet kiszámításának folyamata folyamatosan, rögzített huroksebességgel megismétlődik az 1.ábrán látható módon.
sok esetben a működtető kimenet nem az egyetlen jel, amely hatással van a rendszerre. Például egy hőmérséklet-kamrában lehet egy hideg levegő forrása, amely néha a kamrába fúj, és megzavarja a hőmérsékletet.Ezt a kifejezést zavarnak nevezik., Általában megpróbáljuk megtervezni a vezérlőrendszert, hogy minimalizáljuk a zavarok hatását a folyamatváltozóra.
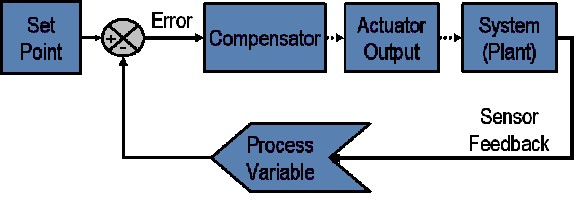
1.ábra: egy tipikus zárt hurkú rendszer blokkdiagramja.
Terminlogies
a vezérlési tervezési folyamat a teljesítménykövetelmények meghatározásával kezdődik. A vezérlőrendszer teljesítményét gyakran úgy mérik, hogy egy lépésfüggvényt alkalmaznak a set point parancsváltozóként, majd megmérik a folyamatváltozó válaszát. Általában a választ meghatározott hullámforma jellemzők mérésével számszerűsítik., Az emelkedési idő az az idő, amelyet a rendszer az állandósult állapot 10%-ról 90% – ra, vagy végső értékre tesz. A százalékos túllépés az az összeg, amelyet a folyamatváltozó túllépi a végső értéket, a végső érték százalékában kifejezve. Az ülepedési idő az az idő, amely ahhoz szükséges, hogy a folyamatváltozó a végső érték egy bizonyos százalékán (általában 5%) belül rendeződjön. Az állandósult hiba a folyamatváltozó és a beállított pont közötti végső különbség. Vegye figyelembe, hogy ezeknek a mennyiségeknek a pontos meghatározása az iparban és a tudományos életben is eltérő lesz.,
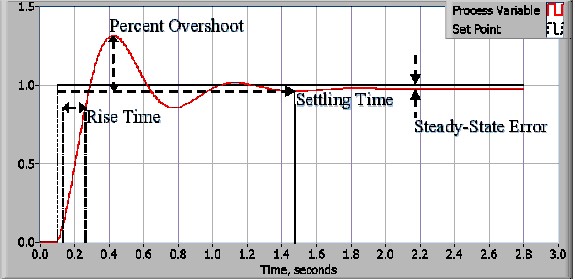
2.ábra: egy tipikus PID zárt hurkú rendszer válasza.
miután ezen mennyiségek egyikét vagy mindegyikét felhasználta egy ellenőrzési rendszer teljesítménykövetelményeinek meghatározására, hasznos meghatározni azokat a legrosszabb eseteket, amelyekben az ellenőrzési rendszer várhatóan megfelel ezeknek a tervezési követelményeknek. Gyakran előfordul, hogy zavar van a rendszerben, amely befolyásolja a folyamatváltozót vagy a folyamatváltozó mérését. Fontos, hogy olyan vezérlőrendszert tervezzünk, amely a legrosszabb körülmények között kielégítően teljesít., Azt, hogy a vezérlőrendszer mennyire képes leküzdeni a zavarok hatásait, a vezérlőrendszer zavarelhárításának nevezik.
bizonyos esetekben a rendszer válasza egy adott vezérlő kimenetre idővel vagy valamilyen változóhoz viszonyítva változhat. A nemlineáris rendszer olyan rendszer, amelyben az egyik működési ponton a kívánt választ produkáló vezérlőparaméterek esetleg nem eredményeznek kielégítő választ egy másik működési ponton., Például egy folyadékkal részben töltött kamra sokkal gyorsabban reagál a fűtőteljesítményre, amikor majdnem üres, mint amikor majdnem tele van folyadékkal. Azt, hogy az ellenőrző rendszer mennyire tolerálja a zavarokat és a nemlinearitást, az ellenőrzési rendszer robusztusságának nevezik.
egyes rendszerek mutatnak nemkívánatos viselkedés úgynevezett holtidő. A holtidő késleltetés, amikor egy folyamatváltozó megváltozik, és amikor ez a változás megfigyelhető., Például, ha EGY hőmérséklet-érzékelőt távol helyeznek el a hidegvízfolyadék bemeneti szelepétől, akkor nem fogja azonnal mérni a hőmérséklet változását, ha a szelep nyitva vagy zárva van. A holtidőt egy olyan rendszer vagy kimeneti működtető is okozhatja, amely lassan reagál a vezérlési parancsra, például egy lassan nyitható vagy bezárható szelep. A vegyi üzemekben a holtidő gyakori forrása a folyadék csöveken keresztüli áramlása által okozott késés.a
Ciklusciklus a zárt hurokrendszer fontos paramétere is. A vezérlő algoritmushoz intézett hívások közötti időintervallum a hurok ciklusideje., A gyorsan változó vagy összetett viselkedésű rendszerek gyorsabb vezérlési huroksebességet igényelnek.
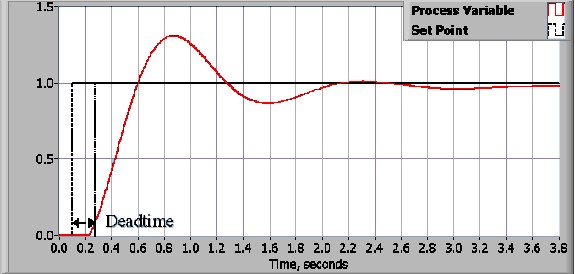
3.ábra: zárt hurkú rendszer reakciója holtidővel.
a teljesítménykövetelmények meghatározása után itt az ideje megvizsgálni a rendszert, és kiválasztani a megfelelő vezérlési sémát. Az alkalmazások túlnyomó többségében a PID vezérlés biztosítja a szükséges eredményeket