Tartalomjegyzék
vezérlőrendszer
a vezérlőrendszerek létfontosságú szerepet játszanak a mindennapi életünkben. Az Automatikus vezérlőrendszer fogalma alapvető és jól keveredik életünk minden területén. Az Automatikus vezérlőrendszer fontos szerepet játszik a mérnöki készségek fejlesztésében, fejlesztésében.,
a rendszer olyan eszközök és komponensek kombinációja, amelyeket valamilyen formában rendszeres interakciók kötnek össze, hogy együtt működjenek és egy bizonyos célt teljesítsenek. A rendszer lehet fizikai, biológiai, gazdasági és hasonlók.
a vezérlő kifejezés szabályozza, irányítja vagy irányítja. Így a vezérlőrendszert úgy lehet meghatározni, mint a csatlakoztatott vagy kapcsolódó eszközök és alkatrészek kombinációját, hogy parancsot adjon, közvetlen vagy szabályozza magát vagy más rendszert.,
A vezérlőrendszereket számos alkalmazásban használják, például a hőmérséklet, a folyadékszint, a helyzet, a sebesség, az áramlás, a nyomás, a gyorsulás stb.
egy vezérlőrendszer jellemzői
a vezérlőrendszer fő jellemzője, hogy egyértelmű matematikai kapcsolatnak kell lennie a rendszer bemenete és kimenete között. Ha a rendszer bemenete és kimenete közötti összefüggést lineáris arányosság jellemzi, akkor a rendszert lineáris vezérlőrendszernek nevezzük., Ismét, amikor a bemenet és a kimenet közötti kapcsolatot nem lehet egyetlen lineáris arányossággal ábrázolni, inkább a bemenetet és a kimenetet valamilyen nemlineáris kapcsolat kapcsolja össze, a rendszert nemlineáris vezérlőrendszernek nevezik.
egy jó vezérlőrendszer követelményei
pontosság: a pontosság a műszer mérési tűrése, és meghatározza a műszer normál üzemi körülmények között történő használatakor elkövetett hibák határértékeit. A pontosság javítható visszacsatolási elemek használatával., A vezérlőrendszer hibadetektorának pontosságának növelése érdekében jelen kell lennie a vezérlőrendszerben.
érzékenység: a vezérlőrendszer paraméterei mindig változnak a környező körülmények, a belső zavarok vagy bármely más paraméter változásával. Ez a változás érzékenységben fejezhető ki. Bármely vezérlőrendszernek érzéketlennek kell lennie az ilyen paraméterekre, de csak a bemeneti jelekre érzékenynek kell lennie.
zaj: a nem kívánt bemeneti jelet zajnak nevezik. A jó vezérlőrendszernek képesnek kell lennie a zajhatás csökkentésére a jobb teljesítmény érdekében.,
stabilitás: ez a vezérlőrendszer fontos jellemzője. A határolt bemeneti jel esetében a kimenetet korlátozni kell, és ha a bemenet nulla, akkor a kimenetnek nullának kell lennie, akkor egy ilyen vezérlőrendszer stabil rendszernek minősül.
sávszélesség: az operációs frekvenciatartomány határozza meg a vezérlőrendszer sávszélességét. A sávszélességnek a lehető legnagyobbnak kell lennie a jó vezérlőrendszer frekvenciaválaszához.
sebesség:a vezérlőrendszer által a stabil kimenet eléréséhez szükséges idő. A jó vezérlőrendszer nagy sebességgel rendelkezik., Az ilyen rendszer átmeneti ideje nagyon kicsi.
oszcilláció: a kimenet kis számú oszcillációja vagy állandó oszcillációja általában azt jelzi, hogy a rendszer stabil.
Alapvető Összetevői Ellenőrző Rendszer
Az alapvető elemek ellenőrzési rendszer által képviselt:
- referencia beviteli elem, aminek a hatására a vezérlő jel;
- visszajelzés elem, amely termel a visszajelzések jel;
- hiba érzékelő;
- – vezérlő;
- szabályozott rendszer; meg
- a kimeneti jelet, azaz a vezérelt kimenet.,
Ezek az összetevők az alábbi ábrán látható rendszerblokk-diagram formájában jelennek meg, és az alábbiak szerint vannak leírva.
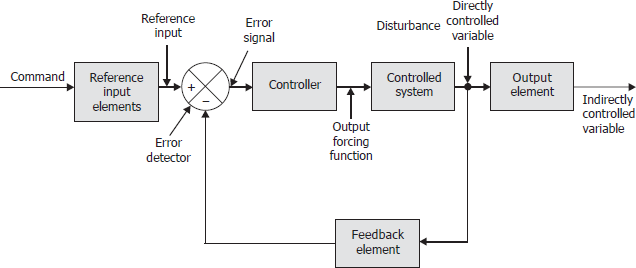
- referencia bemeneti elemek: ezek alkotják a visszacsatolási rendszer helyzetét, amely meghatározza a parancs és bizonyos referencia bemenetek közötti kapcsolatot.,
- parancs: a parancs egy szándékosan bevezetett jel, amelyet valamilyen módon hoztak létre, a vizsgált visszacsatolási rendszertől függetlenül.
- referencia bemenet: ez egy jel, amelyet a visszacsatolási vezérlőrendszer összehasonlítási szabványaként állapítottak meg a parancshoz való viszonyuk alapján.
- hibadetektor: ez egy olyan elem, amelyben egy rendszerváltozót (visszacsatolási jelet) kivonnak egy másik változóból (referenciajel) a harmadik változó (hibajel) megszerzéséhez. Ezt komparátornak is nevezik.,
- visszacsatolási elem: a visszacsatolási jel az ellenőrzött kimenet függvénye, amelyet összehasonlítanak a referenciajellel a működtető jel megszerzéséhez.
- hibajelzés: a referencia bemenet és az elsődleges visszacsatolás algebrai összege.
- Controller: a vezérlő olyan elem, amely a megfelelő vezérlőjelek létrehozásához szükséges.
- kimeneti kényszerítő funkció: ez az a feltétel, amely a működtető jel függvényében változik, hogy megváltoztassa a szabályozott változó értékét.,
- szabályozott rendszer: olyan test, folyamat vagy gép, amelynek egy adott feltételt ellenőrizni kell, például egy űrhajó, reaktor, kazán, CNC gép stb.
- szabályozott változó: ez egy olyan változó, amelyet közvetlenül mérnek és szabályoznak. A zavar más bemenet, mint egy parancs, amely hajlamos arra, hogy befolyásolja az értékét a szabályozott változó.
- kimeneti elemek: ezek azok az elemek, amelyek meghatározzák a közvetlenül vezérelt változó és a közvetetten ellenőrzött változó közötti kapcsolatot.,
A vezérlőrendszer osztályozása
nyitott hurkú vezérlőrendszer
egy olyan vezérlőrendszert, amely nem képes alkalmazkodni a változásokhoz, nyílt hurkú vezérlőrendszernek nevezzük. Általában a kézi vezérlőrendszerek nyitott hurkú rendszerek. A nyitott hurok vezérlőrendszer blokkdiagramját az alábbi ábra mutatja.,

itt az R(t) a bemeneti jel, u(t) a vezérlő jel/működtető jel a jel és a C(t) a kimeneti jel.
ebben a rendszerben a kimenet változatlan marad az állandó bemenethez. Bármilyen eltérés esetén a bemenetet az operátornak manuálisan kell megváltoztatnia., Egy nyitott hurkú vezérlőrendszer akkor alkalmazható, ha a rendszerben tolerancia van a fluktuációval szemben, és amikor a rendszerparaméter-variáció a környezeti feltételektől függetlenül kezelhető.
a nyitott hurok rendszer előnyei
- ezek a rendszerek egyszerűek az építőiparban és a tervezésben.
- a nyitott hurkú rendszerek gazdaságosak.
- ezek a rendszerek karbantartási szempontból egyszerűek.
- általában ezek a rendszerek nem sok problémát jelentenek a stabilitás problémáival.
- ezek a rendszerek kényelmesen használhatók, ha a kimenetet nehéz mérni.,
- ezek a rendszerek nem pontosak és megbízhatóak, mivel pontosságuk a kalibrálás pontosságától függ.
- ezekben a rendszerekben pontatlan eredményeket kapunk paraméterváltozásokkal, azaz belső zavarokkal. a minőség és a pontosság fenntartásához időről időre szükség van a vezérlő újrakalibrálására.
zárt hurkú vezérlőrendszer
minden olyan rendszer, amely képes reagálni a változásokra, és önmagában korrigálni, zárt hurkú vezérlőrendszerként ismert., Az egyetlen különbség a nyitott és a zárt hurkú rendszerek között a visszacsatolási művelet. A zárt hurkú vezérlőrendszer blokkdiagramját az alábbi ábra mutatja.
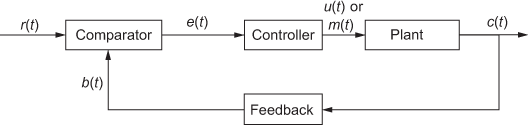
itt a kimenet A gép táplálják vissza a komparátor (hiba detektor). A kimeneti jelet összehasonlítjuk az R(t) referencia bemenettel, majd az E(t) hibajelet elküldjük a vezérlőnek., A hiba alapján a vezérlő beállítja a légkondicionáló bemenetét . Ez a folyamat addig folytatódik, amíg a hiba megszűnik. Mind a kézi, mind az automatikus vezérlés zárt hurkú rendszerben valósítható meg. A rendszer általános nyeresége csökken a visszacsatolás jelenléte miatt. A nyereség csökkentésének kompenzálása érdekében, ha erősítőt vezetnek be a rendszer nyereségének növelése érdekében, a rendszer néha instabillá válhat.
a közeli hurok rendszer előnyei
- ezekben a rendszerekben a pontosság nagyon magas a felmerülő hibák kijavítása miatt.,
- mivel ezek a rendszerek érzékelik a környezet változását, valamint a belső zavarokat, a hiba módosul.
- ezekben a rendszerekben a nem linearitás csökkent hatása van.
- ezek a rendszerek nagy sávszélességgel rendelkeznek, azaz magas működési frekvenciazónával rendelkeznek.
- ezekben a rendszerekben vannak automatizálási lehetőségek.
hátrányok
- a rendszerek bonyolult kialakításúak.
- a zárt hurkú rendszerek költségesebbek.
- ezek a rendszerek instabilak lehetnek.,
a nyitott és zárt hurkú vezérlőrendszerek néhány példája a következő:
- közlekedési lámparendszerek működése változó. Egyes rendszerek zárt hurkúak, mások pedig nyitott hurkúak. A nyitott hurkú típusban van egy időzítési mechanizmus, amely a lámpák rendszeres időközönként történő váltására van beállítva, függetlenül a forgalom mennyiségétől. A zárt hurkú típusnál azonban a csomópontokon áthaladó forgalom mennyiségét (elektronikusan vagy más módon) ellenőrzik, és a “piros” és a “zöld” feltételek időtartamát a csomópont minden egyes részére ennek megfelelően módosítják.,
- a nyitott hurkú rendszer működésének példája egy autómosó gép, amelyben minden autó ugyanolyan mennyiségű mosást kap, függetlenül attól, hogy mennyire piszkos. Itt a kimenet az autók tisztasága, amely megfelel a gép adott beállításának (vízmennyiség és mosási idő). Egy ember, aki azonban autókat mos, automatikusan gondoskodik arról, hogy a piszkosabb autók nagyobb figyelmet kapjanak, mint mások. A felelős ember által végzett autómosás tehát zárt hurkú vezérlőrendszer. A szokásos mosógép egy nyitott hurok rendszer.,
- a hűtőszekrény zárt hurkú rendszer. Hőmérsékletét egy termosztáttal mérik, amely bekapcsolja a motort, amikor a hőmérséklet a kívánt érték fölé emelkedik, majd kikapcsolja a motort, amikor a hőmérséklet ismét eléri a kívánt értéket.
- a szoba világítása egy nyitott hurkú rendszer. Miután a fény be van kapcsolva, akkor marad (amíg ki van kapcsolva) függetlenül attól, hogy a szoba sötét vagy világos.
különbségek a nyitott és zárt hurkú rendszerek között
| S.,Nem. | open-loop System | zárt hurkú rendszer |
| 1 | a visszacsatolási elem hiányzik. | a visszajelzési elem mindig jelen van. |
| 2 | hibaérzékelő nincs jelen. | hibaérzékelő mindig jelen van. |
| 3 | egy nyitott hurok rendszer általában stabil. | a zárt hurkú rendszer bizonyos körülmények között instabillá válhat. |
| 4 | a rendszer nem linearitása befolyásolhatja őket. | beállíthatják a rendszerben jelen lévő nem linearitás hatásait., |
| 5 | könnyű felépíteni. | bonyolult felépítésű. |
| 6 | gazdaságos. | ez költséges. |
| 7 | kis sávszélességgel rendelkezik. | nagy sávszélességgel rendelkezik. |
| 8 | általában pontatlanok. | pontosak. |
| 9 | kevesebb karbantartással rendelkezik. | több karbantartással rendelkezik. |
| 10 | megbízhatatlan. | megbízható., |
| 11 | Examples: Washing machine, fixed time traffic control system, room heater, etc | Examples: Servomotor control, generator output voltage control system, refrigerator, biological system, etc. |
Other Types of Control Systems
Linear and Non-linear
A linear system is one that obeys the principle of superposition., A szuperpozíció elve kimondja, hogy a két különböző kényszerfunkció egyidejű alkalmazásával előállított válasz megegyezik az egyes válaszok összegével.
A nemlineáris rendszerek nem tartják be a szuperpozíció elvét. Szinte minden gyakorlati rendszer bizonyos mértékig nem lineáris. A nem-linearitást a rendszerelemek telítettségi hatása, súrlódási erők, a fogaskerekek közötti játék, a mechanikus összeköttetések, az elektronikus alkatrészek, például a teljesítményerősítők, tranzisztorok stb., használt., A lineáris rendszerek vezérlése egyszerű a nemlineáris rendszerek vezérléséhez képest.
idő-invariáns és idő-változó
az idő-invariáns vezérlőrendszer olyan, amelynek paraméterei nem változnak az idővel. Egy ilyen rendszer válasza független attól az időponttól, amikor a bemenetet alkalmazzák. Például egy elektromos hálózat ellenállása, induktivitása, kapacitása független az időtől.
egy időben változó rendszer olyan, amelyben egy vagy több paraméter változik az idővel. A válasz attól függ, hogy a bemenet mikor kerül alkalmazásra., Az űrjármű-vezérlő rendszer, ahol a tömeg idővel csökken, mivel az általa szállított üzemanyagot repülés közben fogyasztják, egy időváltoztató rendszer példája.
folytonos és diszkrét
folyamatos vezérlőrendszerekben minden rendszerparaméter a folytonos idő függvénye, t. a diszkrét idővezérlés egy vagy több olyan változót foglal magában, amelyek csak az idő diszkrét instantjainál ismertek.
a folyamatos vagy folyamatos adat olyan, amelyben a rendszer különböző részein lévő jelek az idő folyamatos funkciói. Ezek a jelek folyamatos jelek., Például, ha figyelembe vesszük a d.C. motor fordulatszám-szabályozását, tudjuk, hogy a kimenet, vagyis a radianok másodpercenként történő forgása a feszültség és az áram függvénye, amelyet folyamatosan adnak be. Egy ilyen rendszer folyamatos bemenetet vesz igénybe, és folyamatos kimenetet biztosít.
Single-Input-Single-Output (SISO) és Multi-Input–Multi-Output (MIMO)
egy bemenettel és egy kimenettel rendelkező rendszert egy bemenet-egy kimenetű vezérlőrendszernek nevezzük. Más szóval, csak egy parancs és egy vezérelt kimenet van.,
a több bemenettel és több kimenettel rendelkező rendszert multi-input-multi-output vezérlőrendszernek nevezzük. Például a kazán dobszintszabályozása, a robotkar vezérlése stb. A robotkar több funkciót hajt végre több bemenettel. Ezeket a többszörös funkciókat a szabadság mértékének nevezik.
Koncentrált Paraméter Elosztott Paraméter
Control rendszerek leírható közönséges differenciálegyenletek vagy koncentrált paraméter ellenőrzési rendszerek mivel elosztott paraméter ellenőrzési rendszer által leírt parciális differenciálegyenletek., A hosszú távvezeték paraméterei, azaz az ellenállás, az induktivitás és a kapacitás a vonal mentén vannak elosztva, de bizonyos pontokon koholt paramétereknek tekinthetők.
determinisztikus és sztochasztikus
a kontrollrendszer akkor determinisztikus, ha a válasz kiszámítható és megismételhető. Ha nem, akkor a vezérlőrendszer egy sztochasztikus vezérlőrendszer, amely véletlenszerű változó paramétereket tartalmaz.,
statikus és dinamikus rendszerek
egy rendszert dinamikusnak vagy időfüggőnek neveznek, ha a jelenlegi kimenete a múltbeli bemenettől függ, míg egy statikus rendszer az, amelynek áramkimenete csak az aktuális bemenettől függ.