
- qu’est Ce qu’un Servo?
- Comment puis-je Contrôler un Servo?
- Comment contrôler un Servo à partir D’un Arduino?
- Comment contrôler un Servo à partir d’un Raspbery Pi?
- Comment puis-je alimenter un Servo?
- Comment envoyer un Signal sur une longue Distance?
- Comment faire pivoter un Servo D’une quantité spécifique (90°, 180°, continu, etc.)?
- Comment remplacer un ensemble de Servo-engrenages?
- Comment la vitesse du Servo est-elle mesurée?
- comment le couple Servo est-il mesuré?
- à quoi se réfère la « Direction » d’un Servo?
- Qu’est-ce qu’une Spline Servo?,
qu’est Ce qu’un Servo?
Comment puis-je Contrôler un Servo?
Contrairement aux moteurs à courant continu brossés, les servos ne peuvent pas être exécutés en appliquant simplement une tension. En plus de fournir une tension d’alimentation (sur le fil rouge) pour que le moteur puisse tirer, un signal spécifique appelé signal PWM doit être envoyé sur le fil de signal (généralement jaune ou blanc). Ce signal peut provenir d’une variété de sources telles que des servo-contrôleurs, des récepteurs RC ou des Arduinos.
 Servos sont contrôlés par l’envoi d’une impulsion de largeur variable. Le fil de commande est utilisé pour envoyer cette impulsion., Les paramètres de cette impulsion sont qu’elle a une impulsion minimale, une impulsion maximale et un taux de répétition. Compte tenu des contraintes de rotation du servo, le neutre est défini comme étant la position où le servo a exactement la même quantité de rotation potentielle dans le sens horaire que dans le sens antihoraire. Il est important de noter que différents servos auront des contraintes différentes sur leur rotation mais ils ont tous une position neutre, et cette position est toujours autour de 1,5 millisecondes (ms).,
Servos sont contrôlés par l’envoi d’une impulsion de largeur variable. Le fil de commande est utilisé pour envoyer cette impulsion., Les paramètres de cette impulsion sont qu’elle a une impulsion minimale, une impulsion maximale et un taux de répétition. Compte tenu des contraintes de rotation du servo, le neutre est défini comme étant la position où le servo a exactement la même quantité de rotation potentielle dans le sens horaire que dans le sens antihoraire. Il est important de noter que différents servos auront des contraintes différentes sur leur rotation mais ils ont tous une position neutre, et cette position est toujours autour de 1,5 millisecondes (ms).,

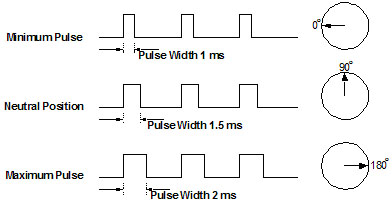
L’angle est déterminé par la durée d’une impulsion est appliquée sur le câble de commande. C’est ce qu’on appelle la Modulation de largeur d’impulsion. Le servo s’attend à voir une impulsion toutes les 20 ms. La longueur de l’impulsion déterminera dans quelle mesure le moteur tourne. Par exemple, une impulsion de 1,5 ms fera tourner le moteur à la position de 90 degrés (position neutre).
lorsque ces servos sont commandés pour se déplacer, ils se déplaceront vers la position et maintiendront cette position., Si une force externe pousse contre le servo alors que le servo maintient une position, Le servo résistera à sortir de cette position. La force maximale que le servo peut exercer est le couple nominal du servo. Les Servos ne tiendront pas leur position pour toujours; l’impulsion de position doit être répétée pour demander au servo de rester en position.
Lorsqu’une impulsion est envoyée à un servo qui est inférieur à 1,5 ms, le servo tourne dans une position et maintient son arbre de sortie à un certain nombre de degrés dans le sens antihoraire du point neutre. Lorsque l’impulsion est plus large que 1,5 ms, le contraire se produit., La largeur minimale et la largeur maximale de l’impulsion qui commanderont au servo de se tourner vers une position valide sont des fonctions de chaque servo. Différentes marques, et même différents servos de la même marque, auront des maximums et des minimums différents. Généralement, l’impulsion minimale sera d’environ 1 ms de large et l’impulsion maximale sera de 2 ms de large.
un Autre paramètre qui varie de servo servo est le taux de virage. C’est le temps qu’il faut au servo pour passer d’une position à une autre., Dans le pire des cas, le temps de rotation est lorsque le servo est maintenu à la rotation minimale et qu’il est commandé pour aller à la rotation maximale. Cela peut prendre plusieurs secondes sur les servos à couple très élevé.
le but de cette information est de donner un aperçu du fonctionnement des servos et de la façon de communiquer avec eux. Bien que nous ayons pris des mesures pour assurer la qualité des informations ici, ServoCity ne donne aucune garantie sur les informations présentées. ServoCity ne peut être tenu responsable de toute utilisation ou mauvaise utilisation des informations fournies., Si vous avez des questions sur ces informations, veuillez envoyer un courriel [email protected].
Comment contrôler un Servo à partir D’un Arduino?
Comment puis-je Contrôler un Servo à partir d’un Raspberry Pi?
alors que Raspberry Pi peut produire un signal PWM, ils sont souvent incapables de maintenir un signal propre en raison de l’absence d’une minuterie dédiée. Si vous contrôlez des servos à partir d’un Raspberry Pi, nous vous recommandons fortement d’obtenir un chapeau servo pour votre raspberry pi.
Comment puis-je alimenter un Servo?,
la meilleure façon d’alimenter un servo est d’utiliser une batterie dont la tension se situe dans la plage de tension spécifiée dans le tableau des spécifications des pages servo. Assurez-vous d’utiliser une batterie saine qui peut fournir plus qu’assez de courant. Puisque le courant est tiré et non poussé, avoir plus de courant disponible que nécessaire ne nuira pas au servo (c’est comme avoir plus d’essence que nécessaire pour obtenir quelque part dans votre voiture). La puissance du moteur du servo est fournie sur le fil rouge., Il peut être utile de couper le fil rouge (ou d’utiliser un X-Acto pour tirer le connecteur du boîtier) afin de pouvoir alimenter séparément le signal. Cela vous permettrait d’alimenter votre récepteur sur une batterie différente de celle de votre servo s’ils ont besoin de tensions différentes. Cela vous permettrait également d’alimenter le moteur de votre servo directement à partir d’une batterie tandis que le signal provient d’un Arduino car les broches Arduino ne peuvent pas gérer le type de courant dont un servo a besoin (elles dépassent généralement 40mA).
Comment envoyer un Signal sur une longue Distance?,
parfois, lors de l’envoi d’un signal sur une longue distance, le signal peut se dégrader en raison de la chute de tension et des interférences électromagnétiques (EMI). Un amplificateur de signal servo peut résoudre ces problèmes et faciliter la transmission du signal sur une grande distance de fil.
Comment faire pivoter un Servo D’une quantité spécifique (90°, 180°, continu, etc.)?
 lorsqu’ils sont contrôlés par un système de radiocommande, la plupart des servos hobby offrent une rotation de 90° (45° dans les deux sens) dès la sortie de la boîte., Cela peut parfois être augmenté si votre système radio offre des réglages de point final ou si votre servocommande dispose d’une broche de cavalier à 180°. Si vous utilisez des servos numériques Hitec, vous souhaitez simplement acheter le programmeur portatif pour augmenter la rotation. Si vous avez un servo analogique Hitec ou Futaba qui n’offre que 90° de rotation, la quantité de rotation peut parfois être augmentée à 180° en effectuant une simple modification.
lorsqu’ils sont contrôlés par un système de radiocommande, la plupart des servos hobby offrent une rotation de 90° (45° dans les deux sens) dès la sortie de la boîte., Cela peut parfois être augmenté si votre système radio offre des réglages de point final ou si votre servocommande dispose d’une broche de cavalier à 180°. Si vous utilisez des servos numériques Hitec, vous souhaitez simplement acheter le programmeur portatif pour augmenter la rotation. Si vous avez un servo analogique Hitec ou Futaba qui n’offre que 90° de rotation, la quantité de rotation peut parfois être augmentée à 180° en effectuant une simple modification.
Remarque: Vous pouvez acheter des servos Hitec chez nous qui sont pré-modifiés dans notre propre usine de fabrication sur les pages individuelles Hitec servo., Cette modification annule toutes les garanties ServoCity et Hitec.
Comment remplacer un jeu de Servo-engrenages?
comment la vitesse du Servo est-elle mesurée?
comment le couple Servo est-il mesuré?
à quoi se réfère la « Direction » d’un Servo?
tous les servos tourneront dans le sens horaire et antihoraire. La direction de rotation du servo dépend du signal que le servo reçoit. Tous les servos ne correspondent pas en ce qui concerne le sens de rotation dès la sortie de la boîte., Si vous branchez un servo Hitec dans votre récepteur de radiocommande ou votre contrôleur de servo et que vous dites au servo de tourner vers la droite (dans le sens des aiguilles d’une montre), il se déplacera vers la droite. Si vous branchez ensuite un servo Futaba dans le même récepteur ou contrôleur servo et lui dites d’aller dans la même direction que le servo Hitec, il se déplacera dans la direction opposée (dans le sens antihoraire). C’est une solution facile avec la plupart des systèmes de radiocommande car ils ont une fonction d’inversion servo
sur l’émetteur., Cette différence entre les fabricants est la raison pour laquelle chaque servo aura une spécification appelant la direction dans laquelle le servo se déplacera avec un signal PWM croissant.
Qu’est-ce qu’une Spline Servo?
l’arbre de sortie denté d’un servo est généralement appelé la cannelure du servo. Pour une ventilation de tous les différents types de cannelures servo sur les servos que nous vendons, consultez L’entrée de cannelure Servo dans notre glossaire.