Electronics Club (Français)
Table des matières
système de contrôle
les systèmes de contrôle jouent un rôle essentiel dans notre vie quotidienne. La notion de système de contrôle automatique est fondamentale et bien mélangée dans toutes les facettes de notre vie. Le système de contrôle automatique joue un rôle important dans l’avancement et l’amélioration des compétences en ingénierie.,
un système est une combinaison de dispositifs et de composants reliés entre eux par une certaine forme d’interactions régulières pour agir ensemble et atteindre un certain objectif. Le système peut être physique, biologique, économique et autres.
le terme contrôle signifie réguler, diriger ou commander. Ainsi, un système de commande peut être défini comme une combinaison de dispositifs et de composants connectés ou liés de manière à commander, diriger ou réguler lui-même ou un autre système.,
les systèmes de contrôle sont utilisés dans de nombreuses applications, par exemple, le contrôle de la température, du niveau de liquide, de la position, de la vitesse, du débit, de la pression, de l’accélération, etc.
Caractéristiques d’un Système de Contrôle
La principale caractéristique d’un système de contrôle est qu’il devrait être clairement la relation mathématique entre l’entrée et la sortie du système. Lorsque la relation entre l’entrée et la sortie du système peut être représentée par une proportionnalité linéaire, le système est appelé système de contrôle linéaire., Encore une fois, lorsque la relation entre l’entrée et la sortie ne peut pas être représentée par une seule proportionnalité linéaire, plutôt que l’entrée et la sortie sont liées par une relation non linéaire, le système est appelé un système de contrôle non linéaire.
les Exigences d’un Bon Système de Contrôle
Précision: la Précision est de la tolérance de mesure de l’instrument et définit les limites des erreurs commises lorsque l’instrument est utilisé dans des conditions normales d’exploitation. La précision peut être améliorée en utilisant des éléments de rétroaction., Pour augmenter la précision de tout Détecteur d’erreur du système de contrôle doit être présent dans le système de contrôle.
sensibilité: les paramètres d’un système de contrôle changent toujours avec le changement des conditions environnantes, la perturbation interne ou tout autre paramètre. Ce changement peut être exprimé en termes de sensibilité. Tout système de contrôle doit être insensible à ces paramètres mais sensible aux signaux d’entrée uniquement.
bruit: un signal d’entrée indésirable est appelé bruit. Un bon système de contrôle devrait pouvoir réduire l’effet de bruit pour de meilleures performances.,
Stabilité: C’est une caractéristique importante du système de contrôle. Pour le signal d’entrée borné, la sortie doit être bornée et si l’entrée est nulle alors la sortie doit être nulle alors un tel système de contrôle est dit être un système stable.
bande passante: une plage de fréquences de fonctionnement détermine la bande passante du système de contrôle. La bande passante doit être aussi grande que possible pour la réponse en fréquence du bon système de contrôle.
Vitesse: c’est le temps pris par le système de contrôle pour atteindre sa sortie stable. Un bon système de contrôle possède une grande vitesse., La période transitoire pour un tel système est très faible.
Oscillation: un petit nombre d’oscillations ou d’oscillations constantes de sortie tend à indiquer que le système est stable.
composants de base d’un système de contrôle
Les composants de base d’un système de contrôle peuvent être représentés par:
- élément d’entrée de référence qui provoque le signal de commande;
- élément de rétroaction qui produit le signal de rétroaction;
- détecteur d’erreur;
- contrôleur;
- Système contrôlé; et
- le signal de sortie, c’est-à-dire la sortie contrôlée.,
ces composants sont présentés sous la forme d’un schéma fonctionnel du système comme dans la figure ci-dessous et sont décrits comme suit.
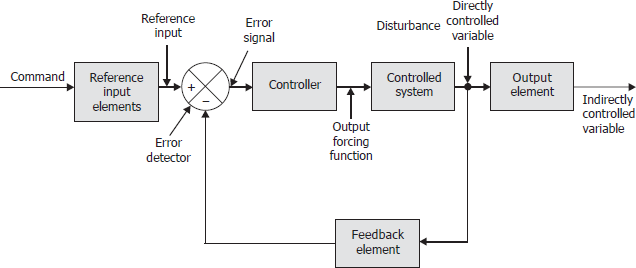
- éléments D’entrée de référence: ils constituent la position du système de contrôle de rétroaction qui établit la relation entre la commande et certaines entrées de référence.,
- commande: la commande est un signal délibérément introduit établi par un moyen, externe et indépendant du système de contrôle de rétroaction considéré.
- Entrée de Référence: C’est un signal établi comme norme de comparaison pour un système de contrôle de rétroaction en vertu de sa relation à la commande.
- Détecteur D’erreur: c’est un élément dans lequel une variable système (signal de rétroaction) est soustraite d’une autre variable (signal de référence) pour obtenir la troisième variable (signal d’erreur). Il est aussi appelé un comparateur.,
- élément de rétroaction: le signal de rétroaction est une fonction de la sortie contrôlée qui est comparée au signal de référence pour obtenir le signal d’actionnement.
- signal D’erreur: c’est une somme algébrique de l’entrée de référence et de la rétroaction primaire.
- contrôleur: le contrôleur est un élément nécessaire pour générer le signal de commande approprié.
- Sortie en Fonction de Forçage: C’est la condition varie en fonction du signal d’actionnement de manière à modifier la valeur de la variable contrôlée.,
- Système contrôlé: il s’agit d’un corps, d’un processus ou d’une machine dont une condition particulière doit être contrôlée, par exemple, un vaisseau spatial, un réacteur, une chaudière, une machine CNC, etc.
- variable contrôlée: c’est une variable directement mesurée et contrôlée. La perturbation est entrée autre qu’une commande qui a tendance à affecter la valeur de la variable contrôlée.
- éléments de sortie: ce sont les éléments qui établissent la relation entre la variable directement contrôlée et la variable indirectement contrôlée.,
Classification du système de contrôle
système de contrôle en boucle ouverte
un système de contrôle qui ne peut pas s’adapter aux modifications est appelé système de contrôle en boucle ouverte. En général, les systèmes de contrôle manuel sont des systèmes en boucle ouverte. Le schéma fonctionnel du système de contrôle en boucle ouverte est illustré dans la Figure ci-dessous.,

Ici, r(t) est le signal d’entrée u(t) est le signal de commande/d’actionnement du signal et c(t) est le signal de sortie.
dans ce système, la sortie reste inchangée pour une entrée constante. En cas de divergence, l’entrée doit être modifiée manuellement par un opérateur., Un système de commande en boucle ouverte est adapté lorsqu’il existe une tolérance à la fluctuation dans le système et lorsque la variation des paramètres du système peut être gérée indépendamment des conditions environnementales.
avantages du système en boucle ouverte
- ces systèmes sont simples dans la construction et la conception.
- Les systèmes en boucle ouverte sont économiques.
- ces systèmes sont faciles du point de vue de la maintenance.
- habituellement, ces systèmes ne sont pas très perturbés par des problèmes de stabilité.
- ces systèmes sont pratiques à utiliser lorsque la sortie est difficile à mesurer.,
Inconvénients
- Ces systèmes ne sont pas précises et fiables en raison de leur précision dépend de la précision de l’étalonnage.
- dans ces systèmes, des résultats inexacts sont obtenus avec des variations de paramètres, c’est-à-dire des perturbations internes.
- un recalibrage du contrôleur est nécessaire de temps en temps pour maintenir la qualité et la précision.
système de contrôle en boucle fermée
tout système qui peut répondre aux changements et apporter des corrections par lui-même est connu comme un système de contrôle en boucle fermée., La seule différence entre les systèmes en boucle ouverte et en boucle fermée est l’action de rétroaction. Le schéma fonctionnel d’un système de contrôle en boucle fermée est illustré dans la Figure ci-dessous.
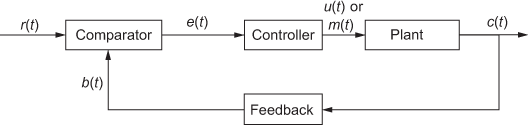
Ici, la sortie de la machine est alimentée en arrière à un comparateur (erreur de détecteur). Le signal de sortie est comparé avec l’entrée de référence r(t) et le signal d’erreur e(t) est envoyé au contrôleur., En fonction de l’erreur, le contrôleur ajuste l’entrée du climatiseur . Ce processus est poursuivi jusqu’à ce que l’erreur soit annulée. Les commandes manuelles et automatiques peuvent être mises en œuvre dans un système en boucle fermée. Le gain global d’un système est réduit en raison de la présence de rétroaction. Afin de compenser la réduction de gain, si un amplificateur est introduite pour augmenter le gain d’un système, le système peut parfois devenir instable.
avantages du système en boucle fermée
- Dans ces systèmes, la précision est très élevée en raison de la correction de toute erreur.,
- étant donné que ces systèmes détectent les changements d’environnement ainsi que les perturbations internes, l’erreur est modifiée.
- Il y a un effet réduit de non-linéarité dans ces systèmes.
- ces systèmes ont une bande passante élevée, c’est-à-dire une zone de fréquence de fonctionnement élevée.
- Il existe des installations d’automatisation dans ces systèmes.
Inconvénients
- Les systèmes sont complexes dans la conception.
- Les systèmes en boucle fermée sont plus coûteux.
- Ces systèmes peuvent être instables.,
voici quelques exemples de systèmes de commande en boucle ouverte et en boucle fermée:
- Les systèmes de feux de circulation varient en fonctionnement. Certains systèmes sont en boucle fermée et d’autres en boucle ouverte. Dans le type de boucle ouverte, il y a un mécanisme de synchronisation qui est placé pour commuter les lumières à intervalles réguliers, indépendamment du volume du trafic. Dans le type de boucle fermée, cependant, la quantité de trafic passant par les jonctions est surveillée (électroniquement ou autrement), et la durée des conditions « rouge” et « verte” sont ajustées pour chaque partie de la jonction En conséquence.,
- Un exemple de l’action d’un système en boucle ouverte est une machine de lavage de voiture dans laquelle toutes les voitures reçoivent la même quantité de lavage, quelle que soit leur saleté. Ici, la sortie est la propreté des voitures, ce qui correspond à un réglage donné de la machine (quantité d’eau et temps de lavage). Un être humain, cependant, qui lave les voitures, s’assure automatiquement que les voitures les plus sales reçoivent plus d’attention que les autres. Le lavage de voiture par un être humain responsable est donc un système de contrôle en boucle fermée. Une machine à laver ordinaire est un système en boucle ouverte.,
- Un réfrigérateur est un système en boucle fermée. Sa température est mesurée par un thermostat qui allume le moteur lorsque la température dépasse la valeur souhaitée et éteint le moteur lorsque la température atteint à nouveau la valeur souhaitée.
- l’éclairage d’une pièce est un système en boucle ouverte. Une fois la lumière allumée, elle restera allumée (jusqu’à ce qu’elle soit éteinte), que la pièce soit sombre ou claire.
les Différences entre la boucle ouverte et en boucle fermée des systèmes
| S.,Aucun. | Système à circuit Ouvert | Système à boucle Fermée |
| 1 | Les commentaires élément est absent. | l’élément feedback est toujours présent. |
| 2 | Une erreur du détecteur n’est pas présent. | un détecteur d’erreur est toujours présent. |
| 3 | Un système à boucle ouverte est généralement stable. | Le système en boucle fermée peut devenir instable dans certaines conditions. |
| 4 | Ils peuvent être affectés par la non-linéarité du système. | Ils peuvent ajuster les effets des non-linéarités présentes dans le système., |
| 5 | Il est facile de construire. | il a une construction compliquée. |
| 6 | C’est économique. | Elle est coûteuse. |
| 7 | Il a une petite bande passante. | il a une grande bande passante. |
| 8 | Ils sont généralement inexactes. | Ils sont exacts. |
| 9 | Il y a moins d’entretien. | Il a plus d’entretien. |
| 10 | Il n’est pas fiable. | Il est fiable., |
| 11 | Examples: Washing machine, fixed time traffic control system, room heater, etc | Examples: Servomotor control, generator output voltage control system, refrigerator, biological system, etc. |
Other Types of Control Systems
Linear and Non-linear
A linear system is one that obeys the principle of superposition., Le principe de superposition stipule que la réponse produite par l’application simultanée de deux fonctions de forçage différentes est égale à la somme des réponses individuelles.
les systèmes Non linéaires n’obéissent pas au principe de superposition. Presque tous les systèmes pratiques sont non linéaires dans une certaine mesure. Les non-linéarités sont introduites en raison de l’effet de saturation des composants du système, des forces de frottement, du jeu entre les trains d’engrenages, des liaisons mécaniques, des non-linéarités des composants électroniques tels que les amplificateurs de puissance, les transistors, etc., utiliser., Contrôle des systèmes linéaires est facile par rapport à la commande des systèmes non linéaires.
invariant dans le temps et variant dans le temps
le système de contrôle invariant dans le temps est un système dont les paramètres ne varient pas avec le temps. La réponse d’un tel système est indépendante du moment auquel l’entrée est appliquée. Par exemple, la résistance, l’inductance et la capacité d’un réseau électrique sont indépendantes du temps.
variable dans le temps est l’une dans laquelle un ou plusieurs paramètres varient avec le temps. La réponse dépend de l’heure à laquelle l’entrée est appliquée., Un système de contrôle de véhicule spatial où la masse diminue avec le temps, car le carburant qu’il transporte est consommé pendant le vol, est un exemple de système VARIANT dans le temps.
temps continu et discret
dans les systèmes de contrôle continu, tous les paramètres du système sont fonction du temps continu, t. Un contrôle à temps discret implique une ou plusieurs variables qui ne sont connues qu’à des instants discrets de temps.
un temps continu ou une donnée continue est une donnée dans laquelle les signaux à différentes parties du système sont des fonctions continues du temps. Ces signaux sont des signaux à temps continu., Par exemple, lorsque nous considérons le contrôle de la vitesse d’un moteur DC, nous savons que la sortie, c’est-à-dire la rotation en termes de radians par seconde, est une fonction de la tension et du courant qui lui sont fournis en entrée sur une base de temps continu. Un tel système prend une entrée en temps continu et fournit une sortie en temps continu.
Mono-Entrée Mono-Sortie (SISO) et Multi-Input Multi-Output (MIMO)
Un système avec une entrée et une sortie est appelé un single-input single-output du système de contrôle. En d’autres termes, il n’y a qu’une seule commande et une production contrôlée.,
Un système à plusieurs entrées et plusieurs sorties est appelée multi-entrée multi-sortie du système de contrôle. Par exemple, contrôle de niveau de tambour de chaudière, contrôle de bras de robot, etc. Le bras du robot remplit plusieurs fonctions avec plusieurs entrées. Ces multiples fonctions sont appelées le degré de liberté.
paramètre groupé et paramètre distribué
les systèmes de contrôle qui peuvent être décrits par des équations différentielles ordinaires sont des systèmes de contrôle de paramètres groupés alors que les systèmes de contrôle de paramètres distribués sont décrits par des équations aux Dérivées Partielles., Les paramètres d’une longue ligne de transmission, c’est-à-dire la résistance, l’inductance et la capacité, sont répartis le long de la ligne, mais ils peuvent être considérés comme des paramètres groupés à certains points.
Déterministes et Stochastiques
Un système de contrôle est déterministe si la réponse est prévisible et reproductible. Sinon, le système de contrôle est un système de contrôle stochastique qui implique des paramètres variables aléatoires.,
systèmes statiques et dynamiques
un système est appelé dynamique ou dépendant du temps si sa sortie actuelle dépend de l’entrée passée, alors qu’un système statique est celui dont la sortie actuelle dépend uniquement de l’entrée actuelle.