
- ¿Qué es un Servo?
- ¿Cómo puedo Controlar un Servo?
- ¿Cómo puedo controlar un Servo desde un Arduino?
- ¿Cómo puedo controlar un Servo desde una Pi Raspbery?
- ¿Cómo puedo alimentar un Servo?
- ¿Cómo envío una señal a larga distancia?
- ¿Cómo Giro un Servo una cantidad específica (90°, 180°, continuo, etc.)?
- ¿Cómo puedo reemplazar un Servo engranaje?
- ¿Cómo se mide la velocidad del Servo?
- ¿Cómo se mide el par Servo?
- ¿A qué se refiere la «dirección» de un Servo?
- ¿Qué es un servo Spline?,
¿qué es un Servo?
¿Cómo puedo Controlar un Servo?
a diferencia de los motores de CC cepillados, los servos no se pueden ejecutar simplemente aplicando un voltaje. Además de suministrar voltaje de alimentación (en el cable rojo) para que el motor tire de, una señal específica llamada señal PWM debe enviarse en el cable de señal (generalmente amarillo o blanco). Esta señal puede provenir de una variedad de fuentes como servo Controladores, receptores RC o Arduinos.
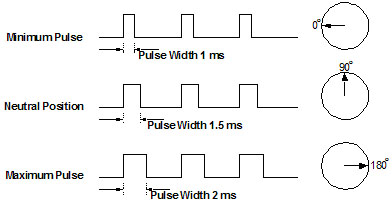
 los Servos se controlan enviándoles un pulso de ancho variable. El cable de control se utiliza para enviar este pulso., Los parámetros para este pulso son que tiene un pulso mínimo, un pulso máximo y una tasa de repetición. Dadas las restricciones de rotación del servo, neutral se define como la posición donde el servo tiene exactamente la misma cantidad de rotación potencial en el sentido de las agujas del reloj que en el sentido contrario a las agujas del reloj. Es importante tener en cuenta que diferentes servos tendrán diferentes restricciones en su rotación, pero todos tienen una posición neutral, y esa posición es siempre alrededor de 1,5 milisegundos (ms).,
los Servos se controlan enviándoles un pulso de ancho variable. El cable de control se utiliza para enviar este pulso., Los parámetros para este pulso son que tiene un pulso mínimo, un pulso máximo y una tasa de repetición. Dadas las restricciones de rotación del servo, neutral se define como la posición donde el servo tiene exactamente la misma cantidad de rotación potencial en el sentido de las agujas del reloj que en el sentido contrario a las agujas del reloj. Es importante tener en cuenta que diferentes servos tendrán diferentes restricciones en su rotación, pero todos tienen una posición neutral, y esa posición es siempre alrededor de 1,5 milisegundos (ms).,

El ángulo está determinado por la duración de un pulso que se aplica para el cable de control. Esto se llama modulación de ancho de pulso. El servo espera ver un pulso cada 20 ms. La longitud del pulso determinará cuánto gira el motor. Por ejemplo, un pulso de 1.5 ms hará que el motor gire a la posición de 90 grados (posición neutral).
cuando se les ordena a estos servos que se muevan, se moverán a la posición y mantendrán esa posición., Si una fuerza externa empuja contra el servo mientras el servo está sosteniendo una posición, el servo resistirá de moverse fuera de esa posición. La cantidad máxima de fuerza que el servo puede ejercer es la calificación de par del servo. Sin embargo, los Servos no mantendrán su posición para siempre; el pulso de posición debe repetirse para indicar al servo que permanezca en posición.
cuando se envía un pulso a un servo que es inferior a 1.5 ms, el servo gira a una posición y mantiene su eje de salida un número de grados en sentido antihorario desde el punto neutro. Cuando el pulso es más ancho que 1.5 ms ocurre lo contrario., El ancho mínimo y el ancho máximo de pulso que ordenará que el servo gire a una posición válida son funciones de cada servo. Diferentes marcas, e incluso diferentes servos de la misma marca, tendrán diferentes máximos y mínimos. Generalmente el pulso mínimo será de aproximadamente 1 ms de ancho y el pulso máximo será de 2 ms de ancho.
el Otro parámetro que varía de servo servo es el ritmo de giro. Este es el tiempo que tarda el servo en cambiar de una posición a otra., El peor tiempo de giro es cuando el servo se mantiene en la rotación mínima y se le ordena que vaya a la rotación máxima. Esto puede tomar varios segundos en servos de par muy alto.
el propósito de esta información es dar una visión general de cómo funcionan los servos y cómo comunicarse con ellos. Aunque hemos tomado medidas para asegurar la calidad de la información aquí, ServoCity no garantiza la información presentada. ServoCity no se hace responsable de ningún uso o mal uso de la información proporcionada., Si usted tiene preguntas sobre esta información por favor E-mail [email protected].
¿Cómo puedo controlar un Servo desde un Arduino?
¿Cómo puedo controlar un Servo desde una Raspberry Pi?
mientras que Raspberry Pis puede emitir una señal PWM, a menudo no pueden mantener una señal limpia debido a la falta de un temporizador dedicado. Si está controlando servos de una Raspberry Pi, le recomendamos encarecidamente que obtenga un servo hat para su raspberry pi.
¿Cómo puedo alimentar un Servo?,
la mejor manera de alimentar un servo es con una batería con un voltaje dentro del rango de voltaje especificado en la tabla de especificaciones de servo pages. Asegúrese de usar una batería saludable que pueda suministrar más que suficiente corriente. Dado que la corriente se tira y no se empuja, tener más corriente disponible de la que se necesita no dañará el servo (es como tener más gasolina de la que necesita para llegar a algún lugar en su automóvil). La potencia del motor del servo se suministra en el cable rojo., Puede ser útil cortar el cable rojo (o usar un X-Acto para extraer el conector de la carcasa) para que pueda suministrar energía por separado de la señal. Esto le permitiría alimentar su receptor con una batería diferente a su servo si necesitan diferentes voltajes. También le permitiría alimentar el motor de su servo directamente desde una batería mientras que la señal proviene de un Arduino, ya que los pines de Arduino no pueden manejar el tipo de corriente que necesita un servo (generalmente maximizan a 40mA).
¿Cómo envío una señal a larga distancia?,
a veces, cuando se envía una señal a larga distancia, la señal puede degradarse debido a la caída de voltaje y la interferencia electromagnética (EMI). Un servo amplificador de señal puede resolver estos problemas y facilitar la transmisión de la señal a una gran distancia de cable.
¿Cómo puedo rotar un Servo una cantidad específica (90°, 180°, continuo, etc.)?
 cuando se controla con un sistema de control por radio, la mayoría de los servos hobby ofrecen una rotación de 90° (45° en cualquier dirección) desde el primer momento., Esto a veces se puede aumentar si su sistema de radio ofrece ajustes de punto final o su servocontrolador tiene un pasador de Puente de 180°. Si está utilizando servos digitales Hitec, simplemente desea comprar el programador de mano para aumentar la rotación. Si tiene un servo analógico Hitec o Futaba que solo ofrece 90° de rotación, la cantidad de rotación a veces se puede aumentar a 180° realizando una simple modificación.
cuando se controla con un sistema de control por radio, la mayoría de los servos hobby ofrecen una rotación de 90° (45° en cualquier dirección) desde el primer momento., Esto a veces se puede aumentar si su sistema de radio ofrece ajustes de punto final o su servocontrolador tiene un pasador de Puente de 180°. Si está utilizando servos digitales Hitec, simplemente desea comprar el programador de mano para aumentar la rotación. Si tiene un servo analógico Hitec o Futaba que solo ofrece 90° de rotación, la cantidad de rotación a veces se puede aumentar a 180° realizando una simple modificación.
Nota: puede comprarnos servos Hitec que están pre-modificados en nuestras propias instalaciones de fabricación en las páginas individuales de servos Hitec., Esta modificación anula todas las garantías de ServoCity y Hitec.
¿Cómo puedo reemplazar un Servo engranaje?
¿cómo se mide la velocidad del Servo?
¿cómo se mide el par Servo?
¿a qué se refiere la «dirección» de un Servo?
todos los servos girarán en sentido horario y antihorario. La dirección del servo gira todo depende de la señal que el servo está recibiendo. No todos los servos coinciden con respecto a la dirección de rotación desde el primer momento., Si conecta un servo Hitec en su receptor de control de radio o servocontrolador y le dice al servo que gire a la derecha (en el sentido de las agujas del reloj), se moverá hacia la derecha. Si luego enchufas un servo Futaba en el mismo receptor o servocontrolador y le dices que vaya en la misma dirección que el servo Hitec, se moverá en la dirección opuesta (en sentido antihorario). Esta es una solución fácil con la mayoría de los sistemas de control de radio, ya que tienen una función servo reversing
en el transmisor., Esta diferencia entre los fabricantes es la razón por la que cada servo tendrá una especificación que indica la dirección en la que el servo se moverá con una señal PWM creciente.
¿qué es una servo Spline?
el eje de salida dentado de un servo se conoce generalmente como la servo spline. Para obtener un desglose de todos los diferentes tipos de servo splines en los servos que vendemos, consulte la entrada servo Spline en nuestro glosario.