tabla de contenidos
sistema de Control
Los sistemas de Control juegan un papel vital en nuestra vida cotidiana. La noción de un sistema de control automático es básica y está bien mezclada en cada faceta de nuestra vida. El sistema de control automático juega un papel importante en el avance y la mejora de las habilidades de ingeniería.,
un sistema es una combinación de dispositivos y componentes conectados entre sí por alguna forma de interacciones regulares para actuar juntos y realizar un determinado objetivo. El sistema puede ser físico, biológico, económico y similares.
el término control significa regular, dirigir o comandar. Por lo tanto, un sistema de control puede definirse como una combinación de dispositivos y componentes conectados o relacionados con el fin de comandar, dirigir o regular a sí mismo o a otro sistema.,
los sistemas de Control se utilizan en muchas aplicaciones, por ejemplo, el control de temperatura, nivel de líquido, posición, velocidad, flujo, Presión, aceleración, etc.
características de un sistema de Control
la característica principal de un sistema de control Es que debe haber una relación matemática clara entre la entrada y la salida del sistema. Cuando la relación entre entrada y salida del sistema puede ser representada por una proporcionalidad lineal, el sistema se denomina sistema de control lineal., Una vez más, cuando la relación entre entrada y salida no puede ser representada por una sola proporcionalidad lineal, más bien la entrada y la salida están relacionadas por alguna relación no lineal, el sistema se conoce como un sistema de control no lineal.
requisitos de un buen sistema de Control
Precisión: La precisión es la tolerancia de medición del instrumento y define los límites de los errores cometidos cuando el instrumento se utiliza en condiciones normales de funcionamiento. La precisión se puede mejorar mediante el uso de elementos de retroalimentación., Para aumentar la precisión de cualquier detector de errores del sistema de control debe estar presente en el sistema de control.
sensibilidad: los parámetros de un sistema de control están siempre cambiando con el cambio en las condiciones circundantes, perturbación interna o cualquier otro parámetro. Este cambio puede expresarse en términos de sensibilidad. Cualquier sistema de control debe ser insensible a tales parámetros, pero sensible a las señales de entrada solamente.
ruido: una señal de entrada no deseada se conoce como ruido. Un buen sistema de control debe ser capaz de reducir el efecto de ruido para un mejor rendimiento.,
Estabilidad: es una característica importante del sistema de control. Para la señal de entrada acotada, la salida debe estar acotada y si la entrada es cero, entonces la salida debe ser cero, entonces se dice que dicho sistema de control Es un sistema estable.
ancho de banda: un rango de frecuencia de operación decide el ancho de banda del sistema de control. El ancho de banda debe ser lo más grande posible para la respuesta de frecuencia del buen sistema de control.
velocidad: es el tiempo que toma el sistema de control para lograr su salida estable. Un buen sistema de control posee alta velocidad., El período transitorio para un sistema de este tipo es muy pequeño.
oscilación: un pequeño número de oscilación o oscilación constante de salida tiende a indicar que el sistema es estable.
componentes básicos de un sistema de Control
los componentes básicos de un sistema de control se pueden representar por:
- elemento de entrada de referencia que causa la señal de comando;
- elemento de retroalimentación que produce la señal de retroalimentación;
- detector de errores;
- controlador;
- Sistema controlado; y
- La señal de salida, es decir, la salida controlada.,
estos componentes se muestran en forma de un diagrama de bloques del sistema como en la figura a continuación y se describen de la siguiente manera.
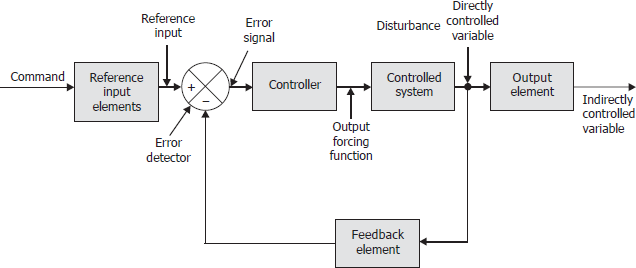
- Elementos de entrada de referencia: estos constituyen la posición del sistema de control de retroalimentación que establece la relación entre el comando y cierta entrada de referencia.,
- comando: el comando es una señal introducida deliberadamente establecida por algún medio, externa e independiente del sistema de control de retroalimentación bajo consideración.
- entrada de referencia: es una señal establecida como un estándar de comparación para un sistema de control de retroalimentación en virtud de su relación con el comando.
- Detector de errores: es un elemento en el que una variable del sistema (señal de retroalimentación) se resta de otra variable (señal de referencia) para obtener la tercera variable (señal de error). También se le llama comparador.,
- elemento de retroalimentación: la señal de retroalimentación es una función de la salida controlada que se compara con la señal de referencia para obtener la señal de accionamiento.
- señal de Error: es una suma algebraica de la entrada de referencia y la retroalimentación primaria.
- controlador: el controlador es un elemento que se requiere para generar la señal de control adecuada.
- Función de forzamiento de salida: es la condición que se varía en función de la señal de accionamiento para cambiar el valor de la variable controlada.,
- Sistema controlado: es un cuerpo, proceso o máquina del cual se debe controlar una condición particular, por ejemplo, una nave espacial, reactor, caldera, máquina CNC, etc.
- variable controlada: es una variable que se mide y controla directamente. La perturbación es una entrada distinta de un comando que tiende a afectar el valor de la variable controlada.
- Elementos de salida: estos son los elementos que establecen la relación entre la variable controlada directamente y la variable controlada indirectamente.,
Clasificación del sistema de Control
sistema de control de bucle abierto
Un sistema de control que no puede ajustarse a los cambios se denomina sistema de control de bucle abierto. En general, los sistemas de control manual son sistemas de bucle abierto. El diagrama de bloques del sistema de control de bucle abierto se muestra en la siguiente figura.,

Aquí, r(t) es la señal de entrada, u(t) es la señal de control / señal y C(T) es la señal de salida.
en este sistema, la salida permanece inalterada para una entrada constante. En caso de discrepancia, la entrada debe ser cambiada manualmente por un operador., Un sistema de control de bucle abierto es adecuado cuando hay tolerancia a la fluctuación en el sistema y cuando la variación de parámetros del sistema se puede manejar independientemente de las condiciones ambientales.
ventajas del sistema de bucle abierto
- Estos sistemas son simples En construcción y diseño.
- Los sistemas de bucle abierto son económicos.
- Estos sistemas son fáciles desde el punto de vista del mantenimiento.
- Por lo general, estos sistemas no están muy preocupados con problemas de estabilidad.
- Estos sistemas son convenientes de usar cuando la salida es difícil de medir.,
desventajas
- Estos sistemas no son precisos y confiables porque su precisión depende de la precisión de la calibración.
- En estos sistemas, se obtienen resultados inexactos con variaciones de parámetros, es decir, disturbios internos.
- Se requiere recalibración del controlador de vez en cuando para mantener la calidad y la precisión.
sistema de control de bucle cerrado
cualquier sistema que pueda responder a los cambios y hacer correcciones por sí mismo se conoce como un sistema de control de bucle cerrado., La única diferencia entre los sistemas de bucle abierto y de bucle cerrado es la acción de retroalimentación. El diagrama de bloques de un sistema de control de circuito cerrado se muestra en la figura siguiente.
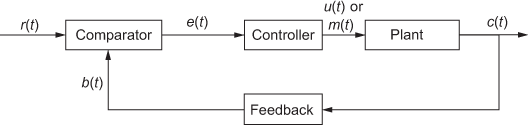
Aquí, la salida de la máquina se alimenta de nuevo a un comparador (detector de error). La señal de salida se compara con la entrada de Referencia r(t) y la señal de error e(t) se envía al controlador., Basado en el error, el controlador ajusta la entrada del aire acondicionado . Este proceso continúa hasta que el error se anula. Los controles manuales y automáticos se pueden implementar en un sistema de bucle cerrado. La ganancia general de un sistema se reduce debido a la presencia de retroalimentación. Para compensar la reducción de ganancia, si se introduce un amplificador para aumentar la ganancia de un sistema, el sistema a veces puede volverse inestable.
ventajas del sistema close-loop
- En estos sistemas, la precisión es muy alta debido a la corrección de cualquier error que surja.,
- dado que estos sistemas detectan cambios en el entorno, así como perturbaciones internas, el error se modifica.
- Hay un efecto reducido de la no linealidad en estos sistemas.
- Estos sistemas tienen un gran ancho de banda, es decir, una zona de alta frecuencia de funcionamiento.
- hay instalaciones de automatización en estos sistemas.
Desventajas
- Los sistemas son complicados en el diseño.
- Los sistemas close-loop son más costosos.
- Estos sistemas pueden ser inestables.,
algunos ejemplos de sistemas de control de bucle abierto y de bucle cerrado son los siguientes:
- Los sistemas de semáforos varían en operación. Algunos sistemas son de bucle cerrado y otros son de bucle abierto. En el tipo de bucle abierto, hay un mecanismo de sincronización que se establece para cambiar las luces a intervalos regulares, independientemente del volumen de tráfico. En el tipo de circuito cerrado, sin embargo, la cantidad de tráfico que pasa a través de los cruces se controla (electrónicamente o de otra manera), y la duración de las condiciones «rojo» y «verde» se ajustan para cada parte del cruce en consecuencia.,
- Un ejemplo de la acción de un sistema de bucle abierto es una máquina de lavado de coches en la que todos los coches reciben la misma cantidad de lavado, independientemente de lo sucios que estén. Aquí, la salida es la limpieza de los coches, que corresponde a un ajuste dado de la máquina (cantidad de agua y tiempo de lavado). Un ser humano, sin embargo, que lava los coches, automáticamente se asegura de que los coches más sucios reciban más atención que otros. El lavado de automóviles por un ser humano responsable es, por lo tanto, un sistema de control de circuito cerrado. Una lavadora ordinaria es un sistema de bucle abierto.,
- Un refrigerador es un sistema de circuito cerrado. Su temperatura se mide mediante un termostato que enciende el motor cuando la temperatura aumenta por encima del valor deseado y apaga el motor cuando la temperatura vuelve a alcanzar el valor deseado.
- La iluminación de una habitación es un sistema de bucle abierto. Una vez que la luz está encendida, permanecerá encendida (hasta que se apague ) independientemente de si la habitación está oscura o clara.
Diferencias entre el de lazo abierto y sistemas de circuito cerrado
| S.,No. | Sistema de lazo Abierto | Sistema de circuito Cerrado |
| 1 | La retroalimentación elemento está ausente. | el elemento feedback siempre presente. |
| 2 | Un detector de error no está presente. | siempre hay un detector de errores. |
| 3 | Un sistema de lazo abierto es generalmente estable. | el sistema de bucle cerrado puede volverse inestable bajo ciertas condiciones. |
| 4 | pueden verse afectados por no linealidades en el sistema. | pueden ajustar los efectos de las no linealidades presentes en el sistema., |
| 5 | es fácil de construir. | tiene una construcción complicada. |
| 6 | es económico. | es costoso. |
| 7 | tiene un pequeño ancho de banda. | tiene un gran ancho de banda. |
| 8 | generalmente son inexactos. | son precisos. |
| 9 | tiene menos mantenimiento. | tiene más mantenimiento. |
| 10 | es poco confiable. | es fiable., |
| 11 | Examples: Washing machine, fixed time traffic control system, room heater, etc | Examples: Servomotor control, generator output voltage control system, refrigerator, biological system, etc. |
Other Types of Control Systems
Linear and Non-linear
A linear system is one that obeys the principle of superposition., El principio de superposición establece que la respuesta producida por la aplicación simultánea de dos funciones de forzamiento diferentes es igual a la suma de las respuestas individuales.
los sistemas no lineales no obedecen al principio de superposición. Casi todos los sistemas prácticos son no lineales hasta cierto punto. Se introducen no linealidades debido al efecto de saturación de los componentes del sistema, fuerzas de fricción, juego entre trenes de engranajes, enlaces Mecánicos, no linealidades de componentes electrónicos como amplificadores de potencia, transistores, etc., utilizar., El Control de sistemas lineales es fácil en comparación con el control de sistemas no lineales.
invariante en el tiempo y variable en el tiempo
el sistema de control invariante en el tiempo es uno cuyos parámetros no varían con el tiempo. La respuesta de dicho sistema es independiente del momento en que se aplica la entrada. Por ejemplo, la resistencia, la inductancia y la capacitancia de una red eléctrica son independientes del tiempo.
un sistema que varía en el tiempo es aquel en el que uno o más parámetros varían con el tiempo. La respuesta depende del momento en el que se aplica la entrada., Un sistema de control de vehículos espaciales en el que la masa disminuye con el tiempo, a medida que el combustible que transporta se consume durante el vuelo, es un ejemplo de un sistema que varía en el tiempo.
tiempo continuo y discreto
en los sistemas de control continuo, todos los parámetros del sistema son una función del tiempo continuo, t. un control de tiempo discreto implica una o más variables que se conocen solo en instantes discretos de tiempo.
un tiempo continuo o datos continuos es uno en el que las señales en varias partes del sistema son funciones continuas de tiempo. Estas señales son señales de tiempo continuo., Por ejemplo, cuando consideramos el control de velocidad de un motor DC, sabemos que la salida, es decir, la rotación en términos de radianes por segundo es una función de voltaje y corriente proporcionada como entrada a él en un tiempo continuo. Tal sistema toma una entrada de tiempo continuo y proporciona una salida de tiempo continuo.
Single-Input–Single-Output (SISO) y Multi-Input–Multi-Output (Mimo)
un sistema con una entrada y una salida se denomina sistema de control single-input–single-output. En otras palabras, solo hay un comando y una salida controlada.,
un sistema con múltiples entradas y múltiples salidas se denomina sistema de control multi-entrada–multi-salida. Por ejemplo, control del nivel del tambor de la caldera, control del brazo del robot, etc. El brazo del robot realiza múltiples funciones con múltiples entradas. Estas múltiples funciones se llaman el grado de libertad.
parámetro agrupado y parámetro distribuido
los sistemas de Control que pueden ser descritos por ecuaciones diferenciales ordinarias son sistemas de control de parámetros agrupados, mientras que los sistemas de control de parámetros distribuidos son descritos por ecuaciones diferenciales parciales., Los parámetros de una línea de transmisión larga, es decir, la resistencia, la inductancia y la capacitancia, se distribuyen a lo largo de la línea, pero pueden considerarse como parámetros agrupados en ciertos puntos.
determinista y estocástico
Un sistema de control es determinista si la respuesta es predecible y repetible. Si no, el sistema de control Es un sistema de control estocástico que involucra parámetros variables aleatorios.,
sistemas estáticos y dinámicos
un sistema se llama dinámico o dependiente del tiempo si su salida actual depende de la entrada pasada, mientras que, un sistema estático es aquel cuya salida actual depende solo de la entrada actual.