Den grundlæggende idé bag en PID controller er at læse en sensor, og beregn derefter den ønskede aktuator output ved beregning proportional, integrerende og afledte reaktioner og summere disse tre komponenter til at beregne output. Før vi begynder at definere parametrene for en PID-controller, skal vi se, hvad et lukket sløjfesystem er, og nogle af de terminologier, der er forbundet med det.,
lukket sløjfesystem
i et typisk styresystem er procesvariablen den systemparameter, der skal styres, såsom temperatur (cc), tryk (psi) eller strømningshastighed (liter/minut). En sensor bruges til at måle procesvariablen og give feedback til styresystemet. Setpunktet er den ønskede eller kommandoværdi for procesvariablen, såsom 100 grader Celsius i tilfælde af et temperaturstyringssystem., På et givet tidspunkt bruges forskellen mellem procesvariablen og setpunktet af styresystemalgoritmen (kompensator) til at bestemme den ønskede aktuatorudgang til at drive systemet (anlæg). For eksempel, hvis den målte temperaturprocesvariabel er 100 .c, og det ønskede temperaturindstillingspunkt er 120 .c, kan den aktuatorudgang, der er specificeret af styringsalgoritmen, være at drive et varmeapparat. Kørsel af en aktuator til at tænde en varmelegeme får systemet til at blive varmere, og resulterer i en stigning i temperaturprocesvariablen., Dette kaldes et lukket kredsløbsstyringssystem, fordi processen med at læse sensorer for at give konstant feedback og beregne den ønskede aktuatorudgang gentages kontinuerligt og med en fast sløjfehastighed som illustreret i figur 1.
i mange tilfælde er aktuatorudgangen ikke det eneste signal, der har indflydelse på systemet. For eksempel kan der i et temperaturkammer være en kilde til kølig luft, der undertiden blæser ind i kammeret og forstyrrer temperaturen.Et sådant udtryk betegnes som forstyrrelse., Vi forsøger normalt at designe styresystemet for at minimere effekten af forstyrrelser på procesvariablen.
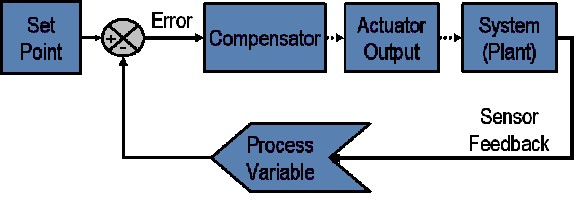
Figur 1: blokdiagram over et typisk lukket sløjfesystem. definition af Terminlogier
kontroldesignprocessen begynder med at definere ydeevnekravene. Styresystemets ydeevne måles ofte ved at anvende en trinfunktion som setpunktskommandovariablen og derefter måle responsen fra procesvariablen. Normalt kvantificeres responsen ved at måle definerede bølgeformkarakteristika., Stigningstid er den tid, det tager at gå fra 10% til 90% af steady-state eller den endelige værdi. Procent overskridelse er det beløb, som procesvariablen overskrider den endelige værdi, udtrykt som en procentdel af den endelige værdi. Afregningstid er den tid, der kræves for procesvariablen at afregne inden for en bestemt procentdel (almindeligvis 5%) af den endelige værdi. Steady-State fejl er den endelige forskel mellem procesvariablen og setpunktet. Bemærk, at den nøjagtige definition af disse mængder vil variere i industrien og den akademiske verden.,
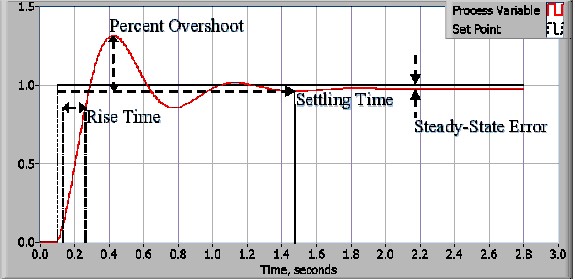
figur 2: respons af et typisk PID-lukket sløjfesystem.
efter at have brugt en eller alle disse mængder til at definere ydeevnekravene for et kontrolsystem, er det nyttigt at definere de worstorst case-forhold, hvor kontrolsystemet forventes at opfylde disse konstruktionskrav. Ofte er der en forstyrrelse i systemet, der påvirker procesvariablen eller måling af procesvariablen. Det er vigtigt at designe et kontrolsystem, der fungerer tilfredsstillende under worstorst case-forhold., Målingen af, hvor godt kontrolsystemet er i stand til at overvinde virkningerne af forstyrrelser, kaldes forstyrrelsesafstødning af kontrolsystemet.
i nogle tilfælde kan systemets respons på en given kontroludgang ændre sig over tid eller i forhold til en eller anden variabel. Et ikke-lineært system er et system, hvor de Kontrolparametre, der producerer en ønsket respons på et driftspunkt, muligvis ikke giver en tilfredsstillende respons på et andet driftspunkt., For eksempel, et kammer delvist fyldt med væske vil udvise en meget hurtigere reaktion på varmelegeme output, når næsten tom, end det vil, når næsten fuld af væske. Målingen af, hvor godt kontrolsystemet tåler forstyrrelser og ikke-lineære forhold, kaldes kontrolsystemets robusthed.nogle systemer udviser en uønsket adfærd kaldet deadtime. Deadtime er en forsinkelse mellem, hvornår en procesvariabel ændres, og hvornår denne ændring kan observeres., For eksempel, hvis en temperatursensor er placeret langt væk fra en koldtvandsvæskeindløbsventil, måler den ikke en temperaturændring straks, hvis ventilen åbnes eller lukkes. Deadtime kan også være forårsaget af et system eller output aktuator, der er langsom til at reagere på kontrolkommandoen, for eksempel en ventil, der er langsom til at åbne eller lukke. En almindelig kilde til dødtid i kemiske anlæg er forsinkelsen forårsaget af strømmen af væske gennem rør.
Sløjfecyklus er også en vigtig parameter i et lukket sløjfesystem. Tidsintervallet mellem opkald til en kontrolalgoritme er loopcyklustiden., Systemer, der ændrer sig hurtigt eller har kompleks adfærd, kræver hurtigere kontrolsløjfehastigheder.
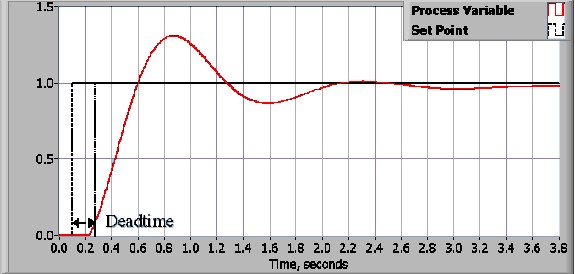
figur 3: respons af et lukket sløjfesystem med dødtid.
når kravene til ydeevne er angivet, er det tid til at undersøge systemet og vælge en passende kontrolordning. I langt de fleste applikationer vil en PID-kontrol give de krævede resultater