
- hvad er en Servo?
- Hvordan styrer jeg en Servo?
- Hvordan styrer jeg en Servo fra en Arduino?
- Hvordan styrer jeg en Servo fra en Raspbery Pi?
- Hvordan tænder jeg en Servo?
- Hvordan sender jeg et Signal over en lang afstand?
- hvordan roterer jeg en Servo en bestemt mængde (90,, 180?, kontinuerlig osv.)?
- hvordan udskifter jeg et Servo Gear sæt?
- hvordan måles Servohastigheden?
- hvordan måles Servomoment?
- hvad er” retningen ” af en Servo, der henviser til?
- hvad er en Servo Spline?,
Hvad er en Servo?
Hvordan styrer jeg en Servo?
i modsætning til børstede DC-motorer kan servoer ikke køres ved blot at anvende en spænding. Udover at levere forsyningsspænding (på den røde ledning) for motoren at trække fra, skal der sendes et specifikt signal kaldet et P .m-Signal på signalledningen (normalt gul eller hvid). Dette signal kan komme fra en række forskellige kilder, såsom servokontrollere, RC-modtagere eller Arduinos.
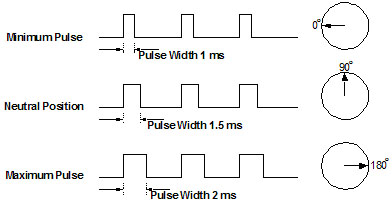
 servoer styres ved at sende dem en puls med variabel bredde. Styretråden bruges til at sende denne puls., Parametrene for denne puls er, at den har en minimumspuls, en maksimal puls og en gentagelseshastighed. I betragtning af servoens rotationsbegrænsninger defineres neutral som den position, hvor servoen har nøjagtigt den samme mængde potentiel rotation i retning med uret, som den gør i retning mod uret. Det er vigtigt at bemærke, at forskellige servoer vil have forskellige begrænsninger på deres rotation, men de har alle en neutral position, og denne position er altid omkring 1,5 millisekunder (ms).,
servoer styres ved at sende dem en puls med variabel bredde. Styretråden bruges til at sende denne puls., Parametrene for denne puls er, at den har en minimumspuls, en maksimal puls og en gentagelseshastighed. I betragtning af servoens rotationsbegrænsninger defineres neutral som den position, hvor servoen har nøjagtigt den samme mængde potentiel rotation i retning med uret, som den gør i retning mod uret. Det er vigtigt at bemærke, at forskellige servoer vil have forskellige begrænsninger på deres rotation, men de har alle en neutral position, og denne position er altid omkring 1,5 millisekunder (ms).,

vinklen bestemmes af varigheden af en puls, der påføres kontrolledningen. Dette kaldes pulsbreddemodulation. Servoen forventer at se en puls hver 20 ms. pulsens længde bestemmer, hvor langt motoren drejer. For eksempel vil en 1, 5 ms puls få motoren til at dreje til 90 graders position (neutral position).
når disse servoer er befalet at flytte, vil de flytte til positionen og holde den position., Hvis en ekstern kraft skubber mod servoen, mens servoen holder en position, vil servoen modstå fra at bevæge sig ud af denne position. Den maksimale mængde kraft, som servoen kan udøve, er servoens drejningsmoment. Servoer vil dog ikke holde deres position for evigt; positionspulsen skal gentages for at instruere servoen om at forblive i position.
Når en puls sendes til en servo, der er mindre end 1,5 ms, roterer servoen til en position og holder sin udgangsaksel et antal grader mod uret fra det neutrale punkt. Når pulsen er bredere end 1,5 ms det modsatte sker., Den minimale bredde og den maksimale bredde af puls, der vil kommandere servoen til at dreje til en gyldig position er funktioner af hver servo. Forskellige mærker,og endda forskellige servoer af samme mærke, vil have forskellige maksimum og minimum. Generelt vil minimumspulsen være omkring 1 ms bred, og den maksimale puls vil være 2 ms bred.
en Anden parameter, der varierer fra servo til servo er turen sats. Dette er den tid det tager fra servoen at skifte fra en position til en anden., Den værst tænkelige drejetid er, når servoen holder ved den minimale rotation, og det er befalet at gå til maksimal rotation. Dette kan tage flere sekunder på servoer med meget højt drejningsmoment.
formålet med disse oplysninger er at give et overblik over, hvordan servoer fungerer, og hvordan de kommunikerer med dem. Selvom vi har taget skridt til at sikre kvaliteten af oplysningerne her, giver ServoCity ingen garantier for de fremlagte oplysninger. ServoCity kan ikke holdes ansvarlig eller ansvarlig for brug eller misbrug af de angivne oplysninger., Hvis du har spørgsmål til disse oplysninger, bedes du sende en e-mail [email protected].
Hvordan styrer jeg en Servo fra en Arduino?
Hvordan styrer jeg en Servo fra en Raspberry Pi?
mens Raspberry Pis kan udsende et P .m-signal, er de ofte ikke i stand til at opretholde et rent signal på grund af manglen på en dedikeret timer. Hvis du styrer servoer fra en Raspberry Pi anbefaler vi stærkt at få en servo hat til din raspberry pi.
Hvordan tænder jeg en Servo?,
den bedste måde at drive en servo på er med et batteri med en spænding inden for det spændingsområde, der er angivet på servosidernes specifikationstabel. Sørg for at bruge et sundt batteri, der kan levere mere end nok strøm. Da strømmen trækkes og ikke skubbes, vil det at have mere strøm til rådighed end nødvendigt ikke skade servoen (det er som at have mere gas end du har brug for at komme et sted i din bil). Strømmen til servoens motor leveres på den røde ledning., Det kan være nyttigt at skære den røde ledning (eller brug en AC-Acto til at trække stikket fra huset), så du kan levere strøm separat fra signalet. Dette giver dig mulighed for at tænde din modtager på et andet batteri end din servo, hvis de har brug for forskellige spændinger. Det vil også give dig mulighed for at drive din servos motor direkte fra et batteri, mens signalet kommer fra en Arduino, da Arduino-stifter ikke kan håndtere den slags strøm, en servo har brug for (de maksimerer generelt ved 40mA).
Hvordan sender jeg et Signal over en lang afstand?,
Nogle gange, når der sendes et signal over en lang afstand, kan signalet nedbrydes på grund af spændingsfald og elektromagnetisk interferens (EMI). En servosignalforstærker kan løse disse problemer og gøre det nemt at transmittere signalet over en stor afstand af ledning.
hvordan roterer jeg en Servo en bestemt mængde (90,, 180?, kontinuerlig osv.)?
 når de styres med et radiostyringssystem, tilbyder de fleste hobbyservoer 90 rotation (45 either begge retninger) rotation lige ud af kassen., Dette kan undertiden øges, hvis dit radiosystem tilbyder slutpunktjusteringer, eller din servo-controller har en 180.jumperstift. Hvis du bruger Hitec digitale servoer, vil du blot købe den håndholdte programmør for at øge rotationen. Hvis du har en Hitec eller Futaba analog servo, der kun tilbyder 90° rotation, kan rotationsmængden undertiden øges til 180.ved at udføre en simpel ændring.
når de styres med et radiostyringssystem, tilbyder de fleste hobbyservoer 90 rotation (45 either begge retninger) rotation lige ud af kassen., Dette kan undertiden øges, hvis dit radiosystem tilbyder slutpunktjusteringer, eller din servo-controller har en 180.jumperstift. Hvis du bruger Hitec digitale servoer, vil du blot købe den håndholdte programmør for at øge rotationen. Hvis du har en Hitec eller Futaba analog servo, der kun tilbyder 90° rotation, kan rotationsmængden undertiden øges til 180.ved at udføre en simpel ændring.
Bemærk: Du kan købe Hitec servoer fra os, der er pre-modificeret i vores egen produktionsfacilitet på de enkelte Hitec servo sider., Denne ændring annullerer alle ServoCity og Hitec garantier.
hvordan udskifter jeg et Servo Gear sæt?
hvordan måles Servohastigheden?
hvordan måles Servomoment?
Hvad er “retningen” af en Servo, der henviser til?
alle servoer vil rotere med uret og mod uret. Retningen servo roterer hele afhænger af signalet servo modtager. Ikke alle servoer matcher med hensyn til rotationsretning lige ud af kassen., Hvis du tilslutter en Hitec-servo til din radiostyringsmodtager eller servokontroller, og du beder servoen om at dreje til højre (med uret), flyttes den til højre. Hvis du derefter tilslutter en Futaba-servo til den samme modtager eller servokontroller og beder den om at gå i samme retning som Hitec-servoen gjorde, vil den bevæge den modsatte retning (mod uret). Dette er en nem løsning med de fleste radiostyringssystemer, da de har en servo vende
funktion på senderen., Denne forskel mellem producenter er grunden til, at hver servo vil have en spec, der kalder den retning, som servoen vil bevæge sig med et stigende p .m-signal.
Hvad er en Servo Spline?
den tandede udgangsaksel på en servo kaldes generelt en servo-spline. For en oversigt over alle de forskellige slags servo splines på de servoer, vi sælger, tjek Servo Spline posten i vores ordliste.