Indholdsfortegnelse
Control System
Kontrol-systemer spiller en afgørende rolle i vores dag-til-dag liv. Begrebet et automatisk kontrolsystem er grundlæggende og godt blandet i alle aspekter af vores liv. Det automatiske styresystem spiller en vigtig rolle i fremskridt og forbedring af tekniske færdigheder.,
et system er en kombination af enheder og komponenter, der er forbundet sammen af en eller anden form for regelmæssige interaktioner for at handle sammen og udføre et bestemt mål. Systemet kan være fysisk, biologisk, økonomisk og lignende.
udtrykket kontrol betyder at regulere, lede eller kommandere. Et kontrolsystem kan således defineres som en kombination af anordninger og komponenter, der er forbundet eller forbundet med henblik på at styre, styre eller regulere sig selv eller et andet system.,
kontrolsystemer anvendes i mange applikationer, for eksempel styring af temperatur, væskeniveau, position, hastighed, strømning, tryk, acceleration osv.
funktioner i et kontrolsystem
hovedfunktionen i et kontrolsystem er, at der skal være et klart matematisk forhold mellem input og output af systemet. Når forholdet mellem input og output af systemet kan repræsenteres ved en lineær proportionalitet, kaldes systemet et lineært styresystem., Igen når forholdet mellem input og output ikke kan repræsenteres ved en enkelt lineær proportionalitet, snarere input og output er relateret til nogle ikke-lineære forhold, kaldes systemet et ikke-lineært kontrolsystem.
krav til et godt kontrolsystem
nøjagtighed: nøjagtighed er instrumentets måletolerance og definerer grænserne for de fejl, der er foretaget, når instrumentet bruges under normale driftsforhold. Nøjagtighed kan forbedres ved hjælp af feedbackelementer., For at øge nøjagtigheden af ethvert styresystem skal fejldetektor være til stede i styresystemet.
følsomhed: parametrene for et kontrolsystem ændres altid med ændringen i omgivende forhold, intern forstyrrelse eller andre parametre. Denne ændring kan udtrykkes med hensyn til følsomhed. Ethvert kontrolsystem bør være ufølsomt over for sådanne parametre, men kun følsomt over for indgangssignaler.
støj: et uønsket indgangssignal kaldes støj. Et godt kontrolsystem skal være i stand til at reducere støjeffekten for bedre ydelse.,
stabilitet: det er en vigtig egenskab ved styresystemet. For det afgrænsede indgangssignal skal udgangen være afgrænset, og hvis indgangen er nul, skal udgangen være nul, så siges et sådant styresystem at være et stabilt system.
båndbredde: et driftsfrekvensområde bestemmer kontrolsystemets båndbredde. Båndbredden skal være så stor som muligt for frekvensresponsen for det gode kontrolsystem.
hastighed: det er den tid, som styresystemet tager for at opnå dets stabile output. Et godt kontrolsystem har høj hastighed., Den forbigående periode for et sådant system er meget lille.
svingning: et lille antal svingninger eller konstant svingning af output har en tendens til at indikere, at systemet er stabilt.
Grundlæggende Komponenter i et Kontrol System
De grundlæggende elementer i et system kan være repræsenteret ved:
- reference input element, som bevirker, at kommandoen signal;
- feedback element, der producerer feedback signal,
- fejl detektor;
- controller;
- kontrolleret system; og
- output-signal, der er kontrolleret output.,
disse komponenter er vist i form af et systemblokdiagram som i figuren nedenfor og beskrives som følger.
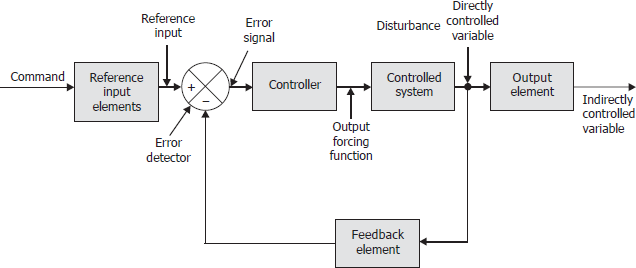
- Reference Input Elementer: Disse udgør position af feedback-kontrol system, der fastlægger forholdet mellem kommandoen og bestemt reference input.,
- kommando: kommando er et bevidst introduceret signal etableret på nogle måder, uden for og uafhængigt af det pågældende feedbackkontrolsystem.
- Reference Input: det er et signal etableret som standard for sammenligning for et feedback-kontrolsystem i kraft af dets forhold til kommandoen.
- fejldetektor: det er et element, hvor en systemvariabel (feedbacksignal) trækkes fra en anden variabel (Referencesignal) for at opnå den tredje variabel (fejlsignal). Det kaldes også en komparator.,feedback Element: Feedback signal er en funktion af det kontrollerede output, som sammenlignes med referencesignalet for at opnå aktiveringssignalet.fejlsignal: det er en algebraisk sum af referenceindgangen og den primære feedback.
- Controller: controlleren er et element, der kræves for at generere det relevante styresignal.
- output tvinger funktion: det er den tilstand, der varieres som en funktion af aktiveringssignalet for at ændre værdien af den kontrollerede variabel.,
- kontrolleret System: det er en krop, proces eller maskine, som en bestemt tilstand skal styres af, for eksempel et rumfartøj, reaktor, kedel, CNC-maskine osv.
- kontrolleret variabel: det er en variabel, der måles direkte og kontrolleres. Forstyrrelsen er input andet end en kommando, der har tendens til at påvirke værdien af den kontrollerede variabel.
- Udgangselementer: dette er de elementer, der etablerer forholdet mellem den direkte kontrollerede variabel og indirekte kontrollerede variabel.,
klassificering af kontrolsystem
Open-Loop Control System
et kontrolsystem, der ikke kan tilpasse sig ændringerne, kaldes et open-loop control system. Generelt er manuelle kontrolsystemer åbne systemer. Blokdiagrammet for open-loop-styresystemet er vist i nedenstående figur.,

Her er f(t) er, input signal, u(t) er kontrol signal/aktivering af signal og c(t) er output-signal.
i dette system forbliver output uændret for konstant input. I tilfælde af uoverensstemmelse skal indgangen ændres manuelt af en operatør., Et åbent styresystem er velegnet, når der er tolerance for udsving i systemet, og når systemparametervariationen kan håndteres uanset miljøforholdene.
fordele ved Open-loop System
- disse systemer er enkle i konstruktion og design.
- open-loop-systemerne er økonomiske.
- disse systemer er lette ud fra vedligeholdelsessynspunktet.
- normalt er disse systemer ikke meget urolige med stabilitetsproblemer.
- disse systemer er nemme at bruge, når output er vanskeligt at måle.,
ulemper
- disse systemer er ikke nøjagtige og pålidelige, fordi deres nøjagtighed afhænger af kalibreringens nøjagtighed.
- i disse systemer opnås unøjagtige resultater med parametervariationer, dvs.interne forstyrrelser.
- rekalibrering af controlleren kræves fra tid til anden for at opretholde kvalitet og nøjagtighed.
lukket kredsløb kontrolsystem
ethvert system, der kan reagere på ændringerne og foretage korrektioner i sig selv, kaldes et lukket kredsløb kontrolsystem., Den eneste forskel mellem open-loop og closed-loop-systemer er feedback-handlingen. Blokdiagrammet for et lukket kredsløbsstyringssystem er vist i nedenstående figur.
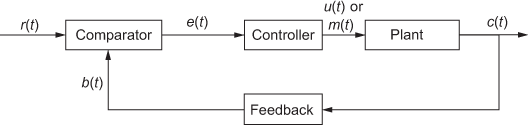
Her, produktionen af maskinen føres tilbage til en sammenligningsgruppe (fejl-detektor). Udgangssignalet sammenlignes med referenceindgangen r(t), og fejlsignalet e(t) sendes til controlleren., Baseret på fejlen justerer controlleren klimaanlæggets input . Denne proces fortsættes, indtil fejlen bliver annulleret. Både manuelle og automatiske kontroller kan implementeres i et lukket kredsløb. Den samlede gevinst af et system reduceres på grund af tilstedeværelsen af feedback. For at kompensere for reduktionen af forstærkning, hvis en forstærker introduceres for at øge forstærkningen af et system, kan systemet undertiden blive ustabilt.
fordele ved close-loop system
- i disse systemer er nøjagtigheden meget høj på grund af korrektionen af eventuelle opståede fejl.,
- da disse systemer registrerer miljøændringer såvel som interne forstyrrelser, ændres fejlen.
- Der er en reduceret effekt af ikke-linearitet i disse systemer.
- disse systemer har høj båndbredde, dvs. høj driftsfrekvens .one.
- Der er faciliteter til automatisering i disse systemer.
ulemper
- systemerne er komplicerede i design.
- close-loop-systemerne er dyrere.
- disse systemer kan være ustabile.,
nogle eksempler på åbne og lukkede styresystemer er som følger:
- Trafiklyssystemer varierer i drift. Nogle systemer er lukkede og nogle er åbne. I open-loop-typen er der en timingsmekanisme, der er indstillet til at skifte lys med jævne mellemrum, uanset trafikmængden. I lukket sløjfe-typen overvåges imidlertid mængden af trafik, der passerer gennem krydsene (elektronisk eller på anden måde), og varigheden af de “røde” og “grønne” betingelser justeres for hver del af krydset i overensstemmelse hermed.,
- et eksempel på virkningen af et open-loop-system er en bilvaskemaskine, hvor alle biler får den samme mængde vask, uanset hvor snavset de er. Her er udgangen renheden af bilerne, hvilket svarer til en given indstilling af maskinen (mængde vand og vasketid). Et menneske, der vasker biler, sørger dog automatisk for, at de snavsede biler får mere opmærksomhed end andre. Bilvask af et ansvarligt menneske er derfor et lukket kredsløbsstyringssystem. En almindelig vaskemaskine er et åbent system.,
- et køleskab er et lukket kredsløbssystem. Dens temperatur måles ved hjælp af en termostat, der tænder motoren, når temperaturen stiger over den ønskede værdi og slukker motoren, når temperaturen igen når den ønskede værdi.
- belysningen af et rum er et åbent loop-system. Når lyset er tændt, forbliver det tændt (indtil det er slukket) uanset om rummet er mørkt eller lyst.
Forskelle mellem open-loop og closed-loop systemer
| S.,Ingen. | Open-loop System | Closed-loop System |
| 1 | feedback-element er fraværende. | feedbacken element altid til stede. |
| 2 | en fejldetektor er ikke til stede. | en fejldetektor er altid til stede. |
| 3 | et open-loop-system er generelt stabilt. | det lukkede loop-system kan blive ustabilt under visse forhold. |
| 4 | de kan påvirkes af ikke-lineariteter i systemet. | de kan justere virkningerne af ikke-lineariteter, der findes i systemet., |
| 5 | det er let at konstruere. | det har kompliceret konstruktion. |
| 6 | det er økonomisk. | det er dyrt. |
| 7 | den har en lille båndbredde. | den har en stor båndbredde. |
| 8 | de er generelt unøjagtige. | de er korrekte. |
| 9 | det har mindre vedligeholdelse. | det har mere vedligeholdelse. |
| 10 | det er upålideligt. | det er pålideligt., |
| 11 | Examples: Washing machine, fixed time traffic control system, room heater, etc | Examples: Servomotor control, generator output voltage control system, refrigerator, biological system, etc. |
Other Types of Control Systems
Linear and Non-linear
A linear system is one that obeys the principle of superposition., Princippet om superposition siger, at svaret produceret ved samtidig anvendelse af to forskellige tvangsfunktioner er lig med summen af individuelle svar.
ikke-lineære systemer overholder ikke princippet om overlejring. Næsten alle praktiske systemer er i nogen grad ikke-lineære. Ikke-lineariteter introduceres på grund af mætningseffekt af systemkomponenter, friktionskræfter, spil mellem geartog, mekaniske forbindelser, ikke-lineariteter af elektroniske komponenter som effektforstærkere, transistorer osv., bruges., Styring af lineære systemer er let i forhold til styring af ikke-lineære systemer.
tid-invariant og tid-varierende
det tid-invariant kontrolsystem er et system, hvis parametre ikke varierer med tiden. Svaret af et sådant system er uafhængigt af det tidspunkt, hvor input anvendes. For eksempel er modstand, induktans og kapacitans af et elektrisk netværk uafhængigt af tiden.
et tidsvarierende system er et system, hvor en eller flere parametre varierer med tiden. Svaret afhænger af det tidspunkt, hvor input anvendes., Et rumfartøjskontrolsystem, hvor massen falder med tiden, da brændstof, det bærer, forbruges under flyvningen, er et eksempel på et tidsvarierende system.
kontinuerlig tid og diskret
i kontinuerlige kontrolsystemer er alle systemparametre en funktion af kontinuerlig tid, t. en diskret tidskontrol involverer en eller flere variabler, der kun er kendt på diskrete tidspunkter.
en kontinuerlig tid eller kontinuerlig data er en, hvor signalerne på forskellige dele af systemet er kontinuerlige funktioner af tid. Disse signaler er kontinuerlige tidssignaler., For eksempel, når vi overvejer hastighedskontrol af en D.c. motor, ved vi, at udgangen, det vil sige rotationen i form af radianer pr. Et sådant system tager en kontinuerlig tid input og giver en kontinuerlig tid output.
Single-Input Single-Output (SISO) og Multi-Input–Multi-Output (MIMO)
Et system med én indgang og én udgang kaldes en single-input single-output-kontrol system. Med andre ord er der kun en kommando og en kontrolleret udgang.,
et system med flere indgange og flere udgange kaldes et multi-input–multi-output kontrolsystem. For eksempel kedel tromle niveau kontrol, robot arm kontrol, etc. Robotarmen udfører flere funktioner med flere indgange. Disse flere funktioner kaldes graden af frihed.
Lumped Parameter og distribueret Parameter
kontrolsystemer, der kan beskrives ved ordinære differentialligninger er lumped parameter kontrolsystemer mens distribuerede parameter kontrolsystemer er beskrevet af partielle differentialligninger., Parametrene for en lang transmissionslinie, det vil sige modstanden, induktansen og kapacitansen, er fordelt langs linjen, men de kan betragtes som klumpede parametre på visse punkter.
deterministisk og stokastisk
et kontrolsystem er deterministisk, hvis responsen er forudsigelig og gentagelig. Hvis ikke, er styresystemet et stokastisk kontrolsystem, der involverer tilfældige variable parametre.,
statiske og dynamiske systemer
et system kaldes dynamisk eller tidsafhængigt, hvis dets nuværende output afhænger af tidligere input, mens et statisk system er det, hvis aktuelle output kun afhænger af den aktuelle input.