základní myšlenkou PID regulátoru je číst senzor, pak vypočítat požadovaný výstup akčního členu na základě výpočtu proporcionální, integrální a derivační odpovědi a součet těchto tří složek pro výpočet výstupu. Než začneme definovat parametry regulátoru PID, uvidíme, co je systém uzavřené smyčky a některé terminologie s ním spojené.,
Systém Uzavřené Smyčky,
V typické kontrolní systém, proces proměnná je systémový parametr, který musí být řízen, např. teplota (°C), tlak (psi), nebo průtok (litrů/minutu). Senzor se používá k měření Procesní proměnné a poskytování zpětné vazby řídicímu systému. Nastavený bod je požadovaná nebo příkazová hodnota pro procesní proměnnou, například 100 stupňů Celsia v případě systému regulace teploty., V daném okamžiku je rozdíl mezi procesní proměnnou a nastaveným bodem používán algoritmem řídicího systému (kompenzátor) k určení požadovaného výstupu pohonu pro pohon systému (zařízení). Pokud je například proměnná procesu měřené teploty 100 ºC a požadovaný nastavený bod teploty je 120 ºC, může být výstup pohonu zadaný řídicím algoritmem poháněn ohřívačem. Řízení pohonu pro zapnutí ohřívače způsobí, že se systém zahřeje, a má za následek zvýšení proměnné teplotního procesu., To se nazývá uzavřené smyčky kontrolu systému, protože proces čtení senzory poskytovat stálou zpětnou vazbu a výpočet požadovaného servomotoru výstup je neustále opakovat a na pevnou rychlost smyčky, jak je znázorněno na obrázku 1.
v mnoha případech není výstup pohonu jediným signálem, který má vliv na systém. Například v teplotní komoře může být zdroj chladného vzduchu, který někdy fouká do komory a narušuje teplotu.Takový termín je označován jako narušení., Obvykle se snažíme navrhnout řídicí systém tak, aby minimalizoval vliv poruch na procesní proměnnou.
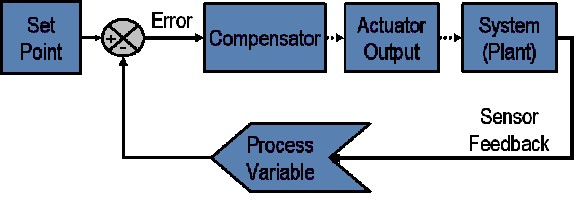
Obrázek 1: blokový diagram typického systému uzavřené smyčky.
definice Terminlogií
proces návrhu řízení začíná definováním požadavků na výkon. Výkon řídicího systému se často měří použitím funkce kroku jako proměnné příkazu set point a následným měřením odezvy procesní proměnné. Obvykle je odezva kvantifikována měřením definovaných charakteristik průběhu., Doba vzestupu je doba, po kterou se systém pohybuje od 10% do 90% ustálené nebo konečné hodnoty. Procentuální překročení je částka, kterou procesní proměnná překračuje konečnou hodnotu vyjádřenou jako procento konečné hodnoty. Doba vypořádání je doba potřebná k tomu, aby se procesní proměnná usadila v určitém procentu (obvykle 5%) konečné hodnoty. Chyba v ustáleném stavu je konečný rozdíl mezi procesní proměnnou a nastaveným bodem. Všimněte si, že přesná definice těchto množství se bude lišit v průmyslu a akademické obci.,
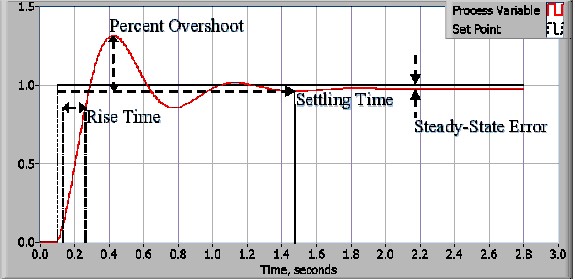
Obrázek 2: Odpověď typického systému uzavřené smyčky PID.
Po použití jednoho nebo všech těchto veličin definovat požadavky na výkon pro řídicí systém, je užitečné definovat nejhorší podmínky, v kterých řídicího systému se očekává, že splnit tyto požadavky na design. Často dochází k narušení systému, které ovlivňuje procesní proměnnou nebo měření Procesní proměnné. Je důležité navrhnout řídicí systém, který funguje uspokojivě během nejhorších případů., Míra toho, jak dobře je řídicí systém schopen překonat účinky poruch, se označuje jako odmítnutí narušení kontrolního systému.
V některých případech se může odezva systému na daný Řídicí výstup měnit v průběhu času nebo ve vztahu k nějaké proměnné. Nelineární systém je systém, ve kterém řídicí parametry, které vytvářejí požadovanou odezvu v jednom provozním bodě, nemusí produkovat uspokojivou odezvu v jiném provozním bodě., Například komora částečně naplněná tekutinou bude vykazovat mnohem rychlejší odezvu na výkon ohřívače, když je téměř prázdná, než když bude téměř plná tekutiny. Míra toho, jak dobře bude řídicí systém tolerovat poruchy a nelinearity, se označuje jako robustnost řídicího systému.
některé systémy vykazují nežádoucí chování zvané deadtime. Deadtime je zpoždění mezi tím, kdy se mění procesní proměnná a kdy lze tuto změnu pozorovat., Pokud je například snímač teploty umístěn daleko od přívodního ventilu studené vody, nebude okamžitě měřit změnu teploty, pokud je ventil otevřen nebo uzavřen. Deadtime může být také způsobena tím, že systém nebo výstup akčního členu, který je pomalu reagovat na řídící příkaz, například, ventil, který je pomalé otevřít nebo zavřít. Společným zdrojem mrtvého času v chemických závodech je zpoždění způsobené průtokem tekutiny potrubím.
cyklus smyčky je také důležitým parametrem systému uzavřené smyčky. Interval času mezi hovory do řídicího algoritmu je doba cyklu smyčky., Systémy, které se rychle mění nebo mají složité chování, vyžadují rychlejší rychlost regulační smyčky.
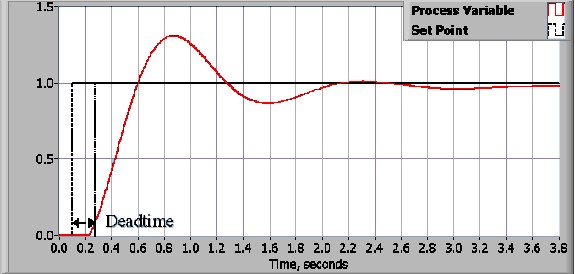
Obr. 3: Odezva uzavřené smyčky systému s deadtime.
jakmile jsou specifikovány požadavky na výkon, je čas prověřit systém a vybrat vhodné schéma řízení. Ve velké většině aplikací poskytne kontrola PID požadované výsledky