obsah
řídicí systém
řídicí systémy hrají v našem každodenním životě zásadní roli. Pojem automatického řídicího systému je základní a dobře promíchaný v každém aspektu našeho života. Automatický řídicí systém hraje důležitou roli v rozvoji a zlepšování inženýrských dovedností.,
systém je kombinací zařízení a komponent spojených dohromady nějakou formou pravidelných interakcí, které působí společně a plní určitý cíl. Systém může být fyzický, biologický, ekonomický a podobně.
termín řízení znamená regulovat, řídit nebo příkazovat. Řídicí systém tedy může být definován jako kombinace zařízení a součástí připojených nebo souvisejících tak, aby bylo možné ovládat, řídit nebo regulovat sám nebo jiný systém.,
řídicí systémy se používají v mnoha aplikacích, například řízení teploty, hladiny kapaliny, polohy, rychlosti, průtoku, tlaku, zrychlení atd.
vlastnosti řídicího systému
hlavním rysem řídicího systému je, že by měl existovat jasný matematický vztah mezi vstupem a výstupem systému. Když může být vztah mezi vstupem a výstupem systému reprezentován lineární proporcionalitou, systém se nazývá lineární řídicí systém., Znovu, když vztah mezi vstupem a výstupem nemůže být reprezentován jedinou lineární proporcionalitou, spíše vstup a výstup souvisí s nějakým nelineárním vztahem, systém je označován jako nelineární řídicí systém.
Požadavky Dobrá Kontrola Systému
Přesnost: Přesnost je měření tolerance nástroje a definuje limity chyby, kdy nástroj se používá v normální provozní podmínky. Přesnost lze zlepšit pomocí prvků zpětné vazby., Pro zvýšení přesnosti jakéhokoli detektoru chyb řídicího systému by měl být v řídicím systému přítomen.
citlivost: parametry řídicího systému se vždy mění se změnou okolních podmínek, vnitřním narušením nebo jinými parametry. Tato změna může být vyjádřena z hlediska citlivosti. Jakýkoli řídicí systém by měl být necitlivý na tyto parametry, ale citlivý pouze na vstupní signály.
šum: nežádoucí vstupní signál je známý jako šum. Dobrý řídicí systém by měl být schopen snížit efekt šumu pro lepší výkon.,
stabilita: je to důležitá charakteristika řídicího systému. U ohraničeného vstupního signálu musí být výstup ohraničen a pokud je vstup nulový, musí být výstup nulový, pak je takový řídicí systém považován za stabilní systém.
Šířka pásma: rozsah provozních frekvencí rozhoduje o šířce pásma řídicího systému. Šířka pásma by měla být co největší pro frekvenční odezvu dobrého řídicího systému.
rychlost: je to čas, který řídicí systém vyžaduje, aby dosáhl svého stabilního výstupu. Dobrý řídicí systém má vysokou rychlost., Přechodné období pro takový systém je velmi malé.
oscilace: malý počet oscilací nebo konstantní oscilace výstupu má tendenci indikovat stabilní systém.
Základní Komponenty kontrolního Systému
základní komponenty řídicí systém může být reprezentován
- referenční vstupní prvek, který způsobuje, že řídící signál;
- zpětná vazba prvek, který vytváří signál zpětné vazby;
- chyba detektor;
- správce;
- řízený systém; a
- výstupní signál, který je řízen výstup.,
tyto komponenty jsou zobrazeny ve formě schématu systémového bloku jako na obrázku níže a jsou popsány následovně.
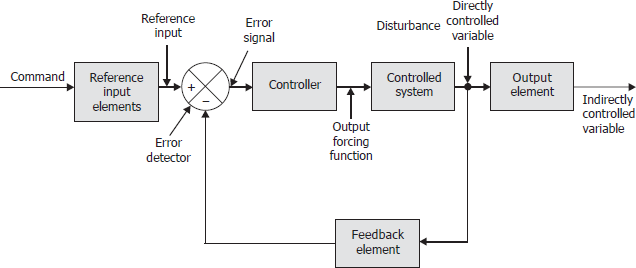
- Referenční Vstupní Prvky: Tyto představují pozice zpětné vazby systému řízení, která stanoví vztah mezi velení a určité referenční vstup.,
- Příkaz: Příkaz je záměrně zaveden signál zřízený nějaké prostředky, externí a nezávislé zpětné vazby systému řízení v úvahu.
- referenční vstup: jedná se o signál vytvořený jako standard srovnání pro systém řízení zpětné vazby na základě jeho vztahu k příkazu.
- detektor chyb: jedná se o prvek, ve kterém je jedna systémová proměnná (signál zpětné vazby) odečtena od jiné proměnné (Referenční signál), aby se získala třetí proměnná (chybový signál). Nazývá se také komparátor.,
- Feedback Element: Feedback signal je funkce řízeného výstupu, která je porovnána s referenčním signálem pro získání ovládacího signálu.
- chybový signál: jedná se o algebraický součet referenčního vstupu a primární zpětné vazby.
- regulátor: regulátor je prvek, který je nutný pro generování příslušného řídicího signálu.
- funkce vynucení výstupu: je to podmínka, která se mění jako funkce ovládacího signálu tak, aby se změnila hodnota řízené proměnné.,
- řízený systém: Jedná se o těleso, proces nebo stroj, jehož konkrétní stav má být řízen, například kosmická loď, reaktor, kotel, CNC stroj atd.
- řízená proměnná: je to proměnná, která je přímo měřena a řízena. Porucha je vstup jiný než příkaz, který má tendenci ovlivnit hodnotu řízené proměnné.
- Výstupní Prvky: to jsou prvky, které vytvoří vztah mezi přímo řízené proměnné a nepřímo řízené proměnné.,
Klasifikace řídícího Systému
Open-Loop Control System
kontrolní systém, který není schopna se přizpůsobit změnám, se nazývá open-loop control system. Obecně platí, že ruční řídicí systémy jsou systémy s otevřenou smyčkou. Blokový diagram řídicího systému s otevřenou smyčkou je znázorněn na obrázku níže.,

zde je vstupní signál R(T), u(t) je řídicí signál/ovládání signál a C(T) je výstupní signál.
v tomto systému zůstává výstup nezměněn pro konstantní vstup. V případě jakéhokoli rozporu by měl být vstup ručně změněn operátorem., Systém řízení s otevřenou smyčkou je vhodný, pokud existuje tolerance kolísání v systému a kdy lze variaci parametrů systému zvládnout bez ohledu na podmínky prostředí.
výhody systému s otevřenou smyčkou
- tyto systémy jsou jednoduché ve stavebnictví a designu.
- systémy s otevřenou smyčkou jsou ekonomické.
- tyto systémy jsou z hlediska údržby snadné.
- tyto systémy obvykle nejsou příliš znepokojeny problémy se stabilitou.
- tyto systémy jsou vhodné pro použití, když je obtížné měřit výstup.,
nevýhody
- tyto systémy nejsou přesné a spolehlivé, protože jejich přesnost závisí na přesnosti kalibrace.
- v těchto systémech jsou získány nepřesné výsledky s variacemi parametrů,tj.
- pro zachování kvality a přesnosti je čas od času nutná rekalibrace regulátoru.
řídicí systém s uzavřenou smyčkou
jakýkoli systém, který může reagovat na změny a provádět opravy sám o sobě, je známý jako řídicí systém s uzavřenou smyčkou., Jediným rozdílem mezi systémy s otevřenou smyčkou a uzavřenou smyčkou je zpětná vazba. Blokový diagram řídicího systému s uzavřenou smyčkou je znázorněn na obrázku níže.
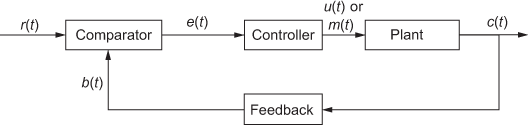
Tady, na výstupu ze stroje je přiváděn zpět na komparátor (chyba detektor). Výstupní signál je porovnán s referenčním vstupem r (t) a chybový signál e(t) je odeslán do regulátoru., Na základě chyby regulátor upraví vstup klimatizace . Tento proces pokračuje, dokud se chyba nezruší. Ruční i automatické ovládání lze implementovat do systému s uzavřenou smyčkou. Celkový zisk systému je snížen kvůli přítomnosti zpětné vazby. Aby se kompenzovalo snížení zisku, pokud je zaveden zesilovač pro zvýšení zisku systému, může se systém někdy stát nestabilním.
výhody systému close-loop
- v těchto systémech je přesnost velmi vysoká kvůli opravě jakékoli vzniklé chyby.,
- protože tyto systémy vnímají změnu prostředí i vnitřní poruchy, je chyba změněna.
- v těchto systémech je snížen účinek nelinearity.
- tyto systémy mají vysokou šířku pásma, tj.
- v těchto systémech jsou zařízení automatizace.
nevýhody
- systémy jsou složité v designu.
- systémy close-loop jsou nákladnější.
- tyto systémy mohou být nestabilní.,
některé příklady řídicích systémů s otevřenou smyčkou a uzavřenou smyčkou jsou následující:
- systémy semaforu se liší v provozu. Některé systémy jsou uzavřené a některé jsou otevřené. V typu otevřené smyčky existuje mechanismus časování, který je nastaven tak, aby v pravidelných intervalech přepínal světla bez ohledu na objem provozu. V uzavřeném typu smyčky je však sledováno množství provozu procházejícího křižovatkami (elektronicky nebo jinak) a doba trvání „červených“ a „zelených“ podmínek je odpovídajícím způsobem upravena pro každou část křižovatky.,
- příkladem působení systému s otevřenou smyčkou je myčka aut, ve které Všechna auta dostávají stejné množství mytí bez ohledu na to, jak jsou špinavá. Zde je výstupem čistota automobilů, která odpovídá danému nastavení stroje (množství vody a doba praní). Lidská bytost, která však myje auta, automaticky zajišťuje, aby špinavější auta dostala více pozornosti než ostatní. Mytí automobilů odpovědnou lidskou bytostí je proto systém řízení s uzavřenou smyčkou. Běžná pračka je systém s otevřenou smyčkou.,
- chladnička je systém s uzavřenou smyčkou. Jeho teplota se měří termostatem, který zapne motor, když teplota stoupne nad požadovanou hodnotu a vypne motor, když teplota opět dosáhne požadované hodnoty.
- osvětlení místnosti je systém s otevřenou smyčkou. Jakmile je světlo zapnuto, zůstane zapnuto (dokud není vypnuto ) bez ohledu na to, zda je místnost tmavá nebo světlá.
Rozdíly mezi open-loop a closed-loop systémy
| S.,Č. | systém s otevřenou smyčkou | systém s uzavřenou smyčkou | 1 | prvek zpětné vazby chybí. | prvek zpětné vazby je vždy přítomen. |
| 2 | není přítomen detektor chyb. | detektor chyb je vždy přítomen. |
| 3 | systém s otevřenou smyčkou je obecně stabilní. | systém s uzavřenou smyčkou může být za určitých podmínek nestabilní. |
| 4 | mohou být ovlivněny nelinearitami v systému. | mohou upravit účinky nelinearit přítomných v systému., |
| 5 | je snadné jej konstruovat. | má složitou konstrukci. |
| 6 | je úsporný. | je to nákladné. |
| 7 | má malou šířku pásma. | má velkou šířku pásma. |
| 8 | jsou obecně nepřesné. | jsou přesné. |
| 9 | má menší údržbu. | má větší údržbu. |
| 10 | je nespolehlivý. | je spolehlivá., |
| 11 | Examples: Washing machine, fixed time traffic control system, room heater, etc | Examples: Servomotor control, generator output voltage control system, refrigerator, biological system, etc. |
Other Types of Control Systems
Linear and Non-linear
A linear system is one that obeys the principle of superposition., Princip superpozice uvádí, že reakce vyvolaná současným použitím dvou různých nucených funkcí se rovná součtu jednotlivých odpovědí.
Nelineární systémy nedodržují princip superpozice. Téměř všechny praktické systémy jsou do jisté míry nelineární. Nelinearity jsou zavedeny v důsledku nasycení účinek systémové komponenty, třecí síly, hrát mezi gear vlaky, mechanické vazby, nelinearity elektronické komponenty, jako jsou výkonové zesilovače, tranzistory, atd., použitý., Řízení lineárních systémů je snadné ve srovnání s řízením nelineárních systémů.
časově invariantní a časově proměnlivý
časově invariantní řídicí systém je ten, jehož parametry se nemění s časem. Odpověď takového systému je nezávislá na době, kdy je vstup aplikován. Například odpor, indukčnost a kapacita elektrické sítě jsou nezávislé na čase.
časově proměnlivý systém je systém, ve kterém se jeden nebo více parametrů mění s časem. Odpověď závisí na době, kdy je vstup aplikován., Systém řízení kosmického vozidla, kde se hmotnost s časem snižuje, protože palivo, které nese, se spotřebovává během letu, je příkladem systému s různou dobou.
spojitý čas a diskrétní
ve spojitých řídicích systémech jsou všechny systémové parametry funkcí spojitého času, t. diskrétní řízení zahrnuje jednu nebo více proměnných, které jsou známy pouze v diskrétních časových okamžicích.
nepřetržitá nebo kontinuální data jsou data, ve kterých jsou signály v různých částech systému spojitými funkcemi času. Tyto signály jsou signály spojitého času., Například, když vezmeme v úvahu, tempomat d.c. motor, víme, že výstup, který je, otáčení ve smyslu radiánů za sekundu je funkcí napětí a proudu jako vstupní, aby to na trvalý úvazek. Takový systém má nepřetržitý vstup a poskytuje nepřetržitý výstup.
Single-Input–Single-Output (SISO) a Multi-Input–Multi-Output (MIMO)
systém s jedním vstupem a jedním výstupem se nazývá single-input–single-output kontrolní systém. Jinými slovy, existuje pouze jeden příkaz a jeden řízený výstup.,
systém s více vstupy a více výstupy se nazývá multi–input-multi-output control system. Například řízení úrovně bubnu kotle, ovládání ramene robota atd. Rameno robota provádí více funkcí s více vstupy. Tyto více funkcí se nazývají stupeň svobody.
paušální parametr a distribuovaný parametr
řídicí systémy, které lze popsat běžnými diferenciálními rovnicemi, jsou sdružené systémy řízení parametrů, zatímco distribuované systémy řízení parametrů jsou popsány parciálními diferenciálními rovnicemi., Odpor, indukčnost a kapacita, jsou distribuovány podél linie, ale mohou být považovány za sdružené parametry v určitých bodech.
deterministický a stochastický
řídicí systém je deterministický, pokud je odpověď předvídatelná a opakovatelná. Pokud tomu tak není, řídicí systém je stochastický řídicí systém, který zahrnuje náhodné proměnné parametry.,
statické a dynamické systémy
systém se nazývá dynamický nebo časově závislý, pokud jeho současný výstup závisí na minulém vstupu, zatímco statický systém je ten, jehož proudový výstup závisí pouze na aktuálním vstupu.